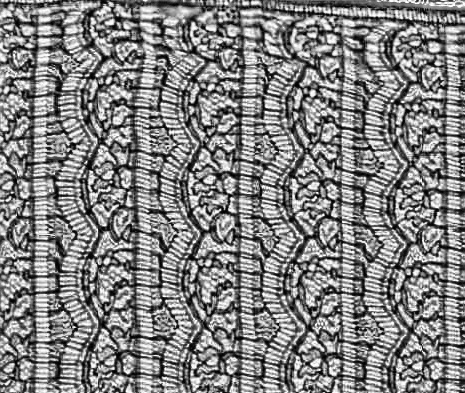
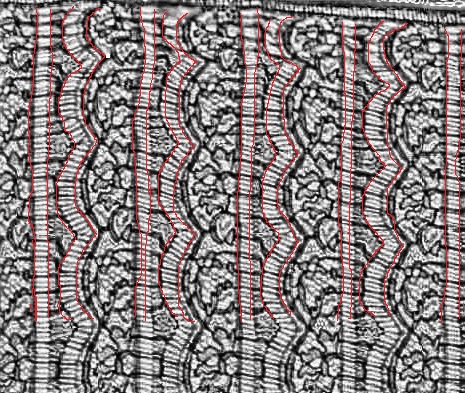
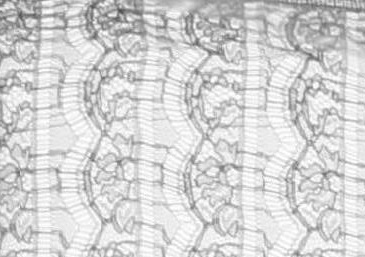
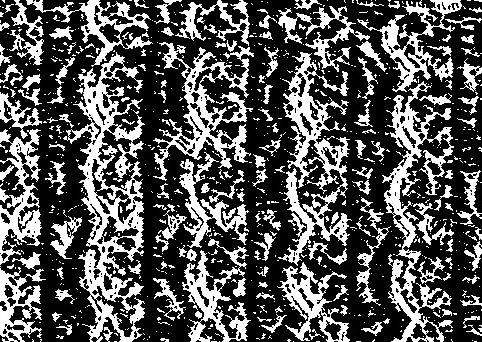
i want to remove small horizontal line and preserve edge of my image using opencv3 or better if existing. I used opencv3 and used fld and i got a poor result because edge were destroyed. Tfis is my code for Fast Line Detection:
void CIpt4vMain::ApplyRemoveBarbs(Mat & InputMat, Mat & OutputMat, /*Mat& OriginalImg, */int nBarbIntensity, int& nProgress) {
// Mat input
Mat input = InputMat.clone();
//int nRows = input.rows;
//int nCols = input.cols;
// Intensity
cl::BarbLength bl = static_cast<cl::BarbLength>(nBarbIntensity);
// FLD parameter
int nLength_threshold;
double nCanny_th1, nCanny_th2;
// Seg
ment parameter
float fLength_decr = 0.0f;
float fLength_incr = 0.0f;
float fLength_critera = 0.0f;
switch (bl) {
case cl::LENGTH_VERYWEAK: fLength_critera=3.0f, fLength_decr =
30.0f, fLength_incr = 2.0f, nLength_threshold = 1, nCanny_th1 =
1.0, nCanny_th2 = 1.0;
break;
case cl::LENGTH_WEAK: fLength_critera = 4.0f, fLength_decr =
30.0f, fLength_incr = 2.0f, nLength_threshold = 1, nCanny_th1 =
1.0, nCanny_th2 = 1.0;
break;
case cl::LENGTH_MEDIUM:fLength_critera =
5.0f, fLength_decr = 30.0f, fLength_incr = 2.0f, nLength_threshold
= 1, nCanny_th1 = 1.0, nCanny_th2 = 1.0;
break;
case cl::LENGTH_STRONG: fLength_critera = 6.0f, fLength_decr =
30.0f, fLength_incr = 2.0f, nLength_threshold = 1, nCanny_th1 =
1.0, nCanny_th2 = 1.0;
break;
case cl::LENGTH_VERYSTRONG: fLength_critera =7.0f, fLength_decr =
30.0f, fLength_incr = 2.0f, fLength_incr = 2.0f, nLength_threshold
= 1, nCanny_th1 = 1.0, nCanny_th2 = 1.0;
break;
case cl::LENGTH_POWERFULL: fLength_critera = 8.0f, fLength_decr =
30.0f, fLength_incr = 2.0f, nLength_threshold = 1, nCanny_th1 =
1.0, nCanny_th2 = 1.0;
break;
case cl::LENGTH_VERYPOWERFULL: fLength_critera = 9.0f, fLength_decr =
30.0f, fLength_incr = 2.0f, nLength_threshold = 10, nCanny_th1 =
1.0, nCanny_th2 = 1.0;
break;
default: fLength_critera = 10.0f, fLength_decr = 4.0f, fLength_incr =
2.0f, nLength_threshold = 10, nCanny_th1 = 10.0, nCanny_th2 = 10.0;
break;
}
// Mask container
//cv::Mat BarbMask = cv::Mat::zeros(input.size(), input.type());
//cv::Mat EdgeMask = BarbMask.clone();
//************ Looking for Mask of Barbs
vector<Vec4f> vecLines;
ApplyFLD(input, vecLines, nLength_threshold, nCanny_th1, nCanny_th2);
int nLinesCount = vecLines.size();
// ******************* Sort Edge (barb or edge)
for (int i = 0; i < nLinesCount; i++) {
Vec4f line = vecLines[i];
CEdgeLace* pEl = new CEdgeLace(line);
if (pEl->IsBarb(fLength_critera)) {
CBarbLace* b = (CBarbLace*)pEl;
// Decrease barb length
//b->Reduce_SegmentLength(fLength_decr);
// Draw the new reduced edge in white with a tchickness = 10;
b->Draw(input, 3, Scalar(255, 255, 255));
}else {
//pEl->Increase_SegmentLength();
//// Draw the new reduced edge in white with a tchickness = 10;
//pEl->Draw(EdgeMask, 30, Scalar(0, 0, 0));
}
}
// Merge the two mask with the input image
//ApplyInversion(BarbMask, BarbMask);
//ApplyMask(input, BarbMask);
//ApplyMask(input, EdgeMask);
//OutputMat = input.clone(); OutputMat = input.clone(); }
BOOL CEdgeLace::IsBarb(float fLength) {
//BOOL bCritera0 = FALSE;
BOOL bCritera1 = FALSE;
BOOL bResult = FALSE;
// Test Length
//if (m_fLength >= fLength && m_fLength>=0.0f) { bCritera0 = TRUE; }
// Test Orientation angle
if (m_fSlope_Degree >= -40.0f && m_fSlope_Degree <= 40.0f) { bCritera1
= TRUE; }
// Validate Critera
if (/*bCritera0 && */bCritera1) {bResult = TRUE;}
return bResult; }
thanks for your answers