Hi,
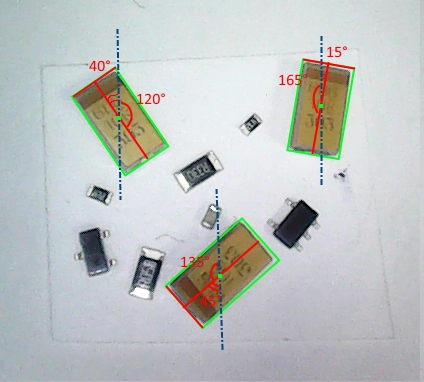
I'm trying to detect some objects on scene and find angles of rotation relative to the axis.
Let me show more detailed.
I have got pictures from camera, something like this (there are some electronic components, they may be mixed and rotated in random way):
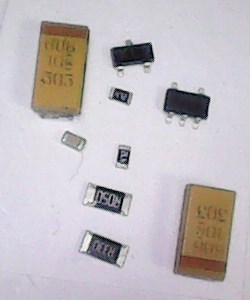
I tried to use template matching. I used next image as template:

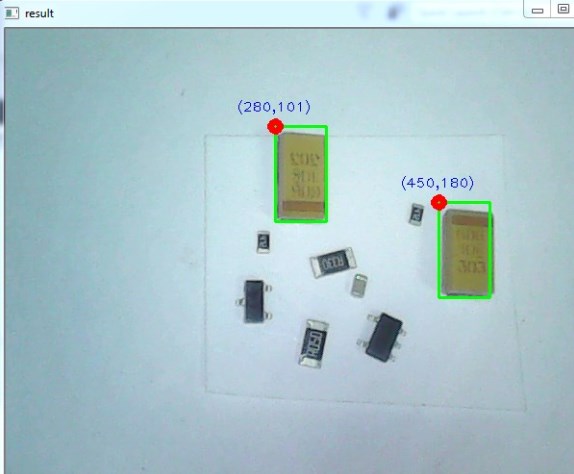
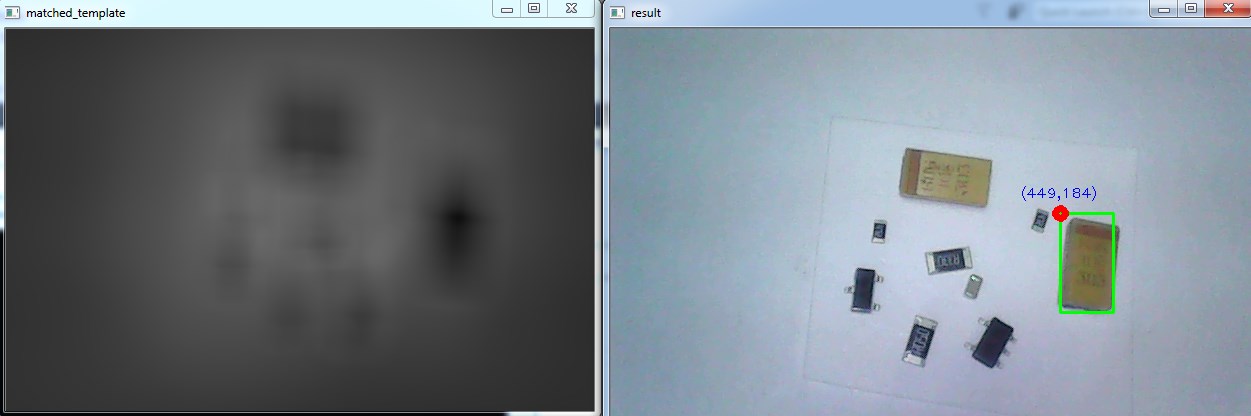
After processing I got next result (with some drawings over it):
How can I detect that one of them is rotated for 180 degrees?
I'm using template match tutorial as basic.
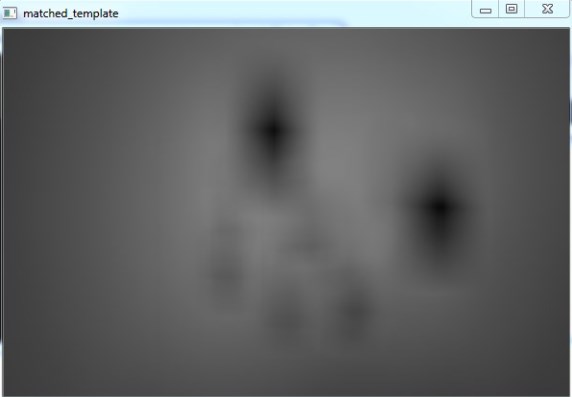
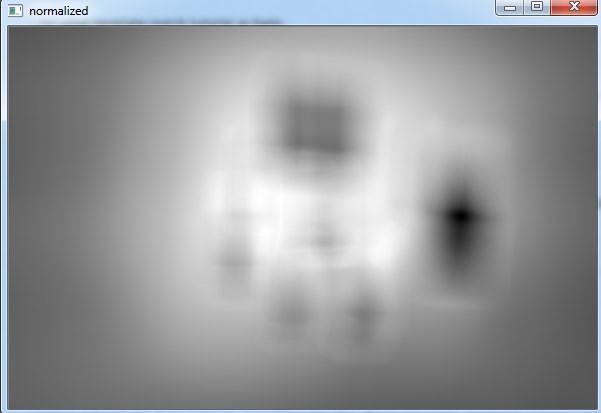
Here is how image looks like after template matching (CV_TM_SQDIFF_NORMED):
Not sure that it is possible to say where is top side or bottom for mathched regions... Maybe I'm moving in wrong way and I need to use another algoritm?
One more thing:
As you can see, when objet is rotated at 90 degree, it is harder to find maching (even with normalization):
here is code:
main:
int main(int argc, char** argv)
{
Mat image_input, component_template;
VideoCapture cap(0);
cap >> image_input;
//Mat image_input = imread("d:\\SRC.jpg");
component_template = imread("d:\\TMP.jpg");
vector<Point> match_centers = imageComparation(component_template, image_input, CV_TM_SQDIFF_NORMED, 0.9);
drawMatch(component_template, image_input, match_centers);
imshow("result", image_input);
waitKey(0);
return 0;
}
compare image function:
vector<point> imageComparation(Mat object, Mat scene, int match_method, float peek_percent) { Mat img_display; scene.copyTo(img_display);
// Create the result matrix
int result_cols = scene.cols - object.cols + 1;
int result_rows = scene.rows - object.rows + 1;
Mat result(result_cols, result_rows, CV_32FC1);
// match scene with template
matchTemplate(scene, object, result, match_method);
imshow("matched_template", result);
//normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());
imshow("normalized", result);
// Localizing the best match with minMaxLoc
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
// For SQDIFF and SQDIFF_NORMED, the best matches are lower values. For all the other methods, the higher the better
if (match_method == CV_TM_SQDIFF || match_method == CV_TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
//threshold(result, result, 0.1, 1, CV_THRESH_BINARY_INV);
threshold(result, result, 0.1, 1, CV_THRESH_BINARY_INV);
imshow("threshold_1", result);
}
else
{
matchLoc = maxLoc;
threshold(result, result, 0.9, 1, CV_THRESH_TOZERO);
imshow("threshold_2", result);
}
vector<Point> res;
maxVal = 1.f;
while (maxVal > peek_percent)
{
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat());
if (maxVal > peek_percent)
{
rectangle(result, Point(maxLoc.x - object.cols / 2, maxLoc.y - object.rows / 2), Point(maxLoc.x + object.cols / 2, maxLoc.y + object.rows / 2), Scalar::all(0), -1);
res.push_back(maxLoc);
}
}
return res;
}
drawing stuff:
void drawMatch(Mat object, Mat scene, vector<point> match_centers) {
for (size_t i = 0; i < match_centers.size(); i++)
{
Point middle_x, middle_y;
// middle of template at X
middle_x = Point((object.cols / 2) + match_centers[i].x, match_centers[i].y);
// middle of template at Y
middle_y = Point(match_centers[i].x, match_centers[i].y + (object.rows / 2)) ;
//circle(scene, middle_x, 2, Scalar(0, 255, 255), 3);
//circle(scene, middle_y, 2, Scalar(255, 0, 255), 3);
rectangle(scene, Point(match_centers[i].x, match_centers[i].y), Point(match_centers[i].x + object.cols, match_centers[i].y + object.rows), Scalar(0, 255, 0), 2);
circle(scene, Point(match_centers[i].x, match_centers[i].y), 5, Scalar(0, 0, 255), 5);
putText(scene, "(" + intToString(match_centers[i].x) + "," + intToString(match_centers[i].y) + ")", Point(match_centers[i].x - 40, match_centers[i].y - 15), 1, 1, Scalar(255, 0, 0));
}
}
full code: link at pastebin