Heya,
I am currently working on a project to track a given object (a pattern image) using my webcam. The Features2D + Homography tutorial was a great help to start with all the cool stuff using OpenCV.
However, it works good, but not perfect. In detail, I experience the same results as the guy in this video.
At the first look it looks pretty cool and it actually is, but one can notice sometimes the white rectangle becomes a trapeze on the left side (in the live view), and sometimes even extreme outliers such as this one appear:
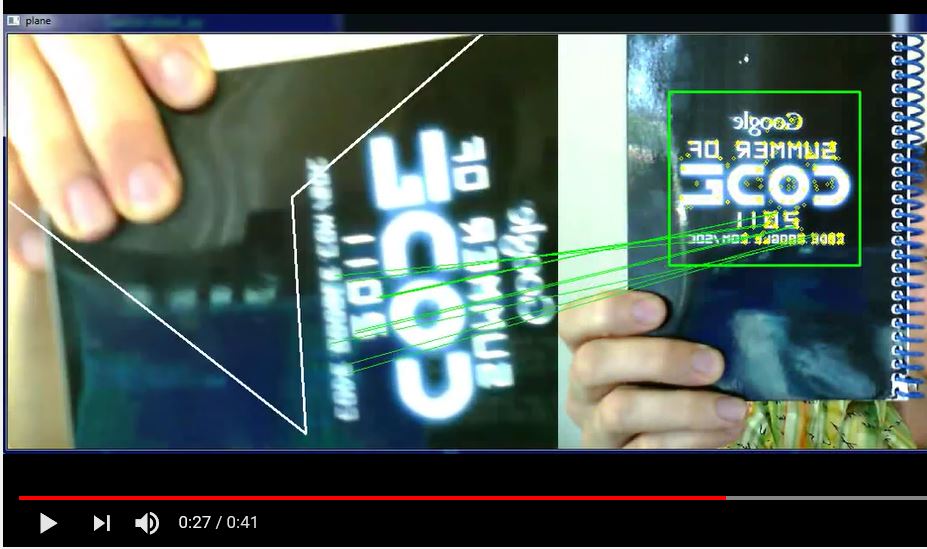
or this one:
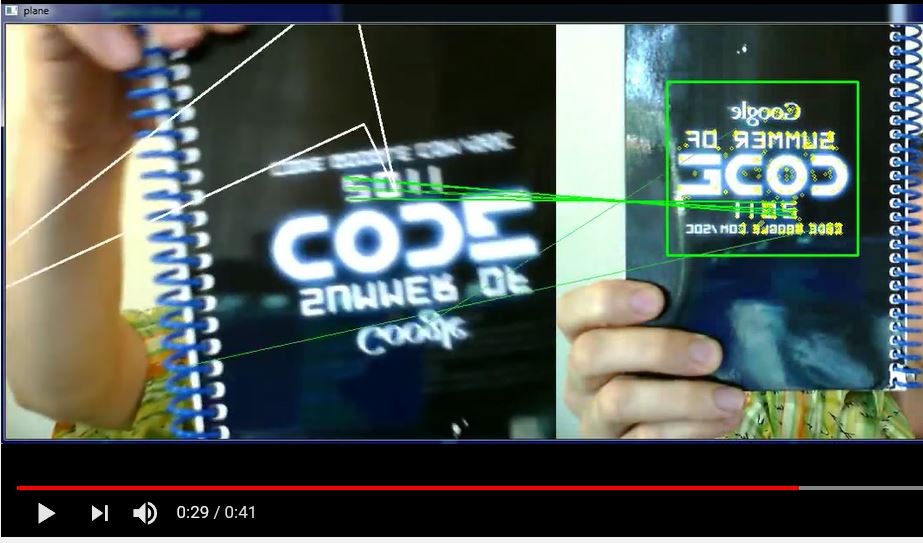
Besides those, what I am actually interested in to improve is avoiding 'semi outliers', where the white rectangle becomes more a trapeze:

I already use the outlier-removal technique "ratio test" performing KNN-matching with K=2 for feature matching and the RANSAC method when calling findHomography.
I don't ask for any sample Code or working solution, I just wondered if there is a cheap and maybe(?) easy way to improve the accuracy.
Might be looking for too much perfection, but I'd be glad if someone had a clever idea for that :P