Why is my code snippet giving my weird results for projected points?
vector<Point3d> points_3d;
points1_3d.push_back(Point3d(10, 10, 100));
Mat points3d = Mat(points_3d);
Mat rvec = (Mat_<double>(3, 3) << (1, 0, 0, 0, 1, 0, 0, 0, 1));
Mat tvec = (Mat_<double>(3, 1) << (0, 0, 0));
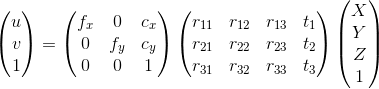
Mat K = (Mat_<double>(3,3)
<< (1000, 0, 50,
0, 1000, 50,
0, 0, 1));
Mat points_2d;
projectPoints(points_3d, rvec, tvec, K, Mat(), points_2d);
cout << points_2d;
I get as projected 2D Point = -1.708699427820658e+024, -9.673395654445999e-026