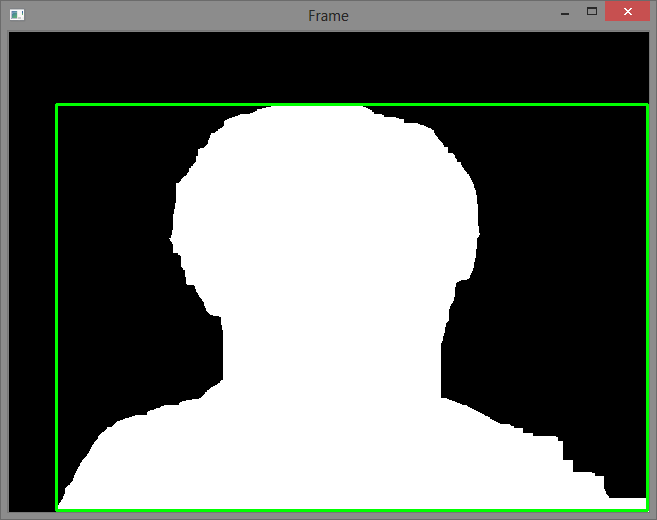
Hi all, I wanna segementing a solid blobs for each object from extracted foreground and bounding each object with a box. But my code show many boxes bounding random blobs on 1 object, because my blob is not solid for 1 object and there're many small blobs too.
Here we go my code:
#include"stdafx.h"
#include<vector>
#include<iostream>
#include<opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
int main(int argc, char *argv[])
{
cv::Mat frame;
cv::Mat fg;
cv::Mat thresholded;
cv::Mat thresholded2;
cv::Mat result;
cv::Mat bgmodel;
cv::namedWindow("Frame");
cv::namedWindow("Background Model");
cv::VideoCapture cap(0);
cv::BackgroundSubtractorMOG2 bgs;
bgs.nmixtures = 2;
bgs.history = 60;
bgs.varThreshold = 15;
bgs.bShadowDetection = true;
bgs.nShadowDetection = 0;
bgs.fTau = 0.5;
std::vector<std::vector<cv::Point>> contours;
for(;;)
{
cap >> frame;
cv::blur(frame,frame,cv::Size(10,10));
bgs.operator()(frame,fg);
bgs.getBackgroundImage(bgmodel);
cv::erode(fg,fg,cv::Mat());
cv::dilate(fg,fg,cv::Mat());
cv::threshold(fg,thresholded,70.0f,255,CV_THRESH_BINARY);
cv::threshold(fg,thresholded2,70.0f,255,CV_THRESH_BINARY);
cv::findContours(thresholded, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
cv::cvtColor(thresholded2, result, CV_GRAY2RGB );
for (std::vector<std::vector<cv::Point> >::iterator itc=contours.begin() ; itc < contours.end(); itc++ ){
std::vector<cv::Point> pts = *itc;
cv::Mat pointsMatrix = cv::Mat(pts);
cv::Scalar color( 0, 255, 0 );
cv::Rect r0= cv::boundingRect(pointsMatrix);
cv::rectangle(result,r0,color,2);
}
cv::imshow("Frame",result);
cv::imshow("Background Model",bgmodel);
if(cv::waitKey(30) >= 0) break;
}
return 0;
}
And the result here:
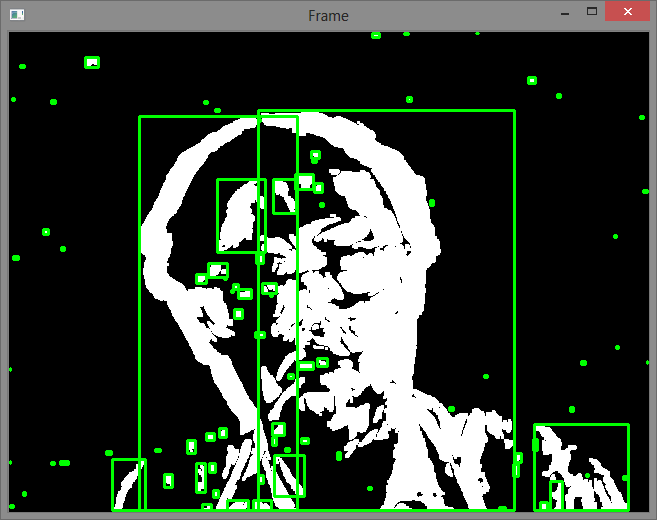
so how I can segmenting a solid blob for each object found from extracted foreground, and bounding the object on by one with the box? I'll apreciating any help here.
NB: Sorry for my bad English. :)