image:
This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
image:
| | 2 | No.2 Revision |
image:
| | 3 | No.3 Revision |
image:
| | 4 | No.4 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
image:
?
| | 5 | No.5 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
image:image:! Disparity Image ?
| | 6 | No.6 Revision |
| | 7 | No.7 Revision |
| | 8 | No.8 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
image:! Disparity Image
image:
?
| | 9 | No.9 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
image:
?
| | 10 | No.10 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
with:
image:
?
| | 11 | No.11 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
image:![Disparity Image]
(/C:/Users/Barisoezcan/Desktop/DisparityMap.bmp "DisparityMap")
image: ?
?
| | 12 | No.12 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:
image:with:
image:
| | 13 | No.13 Revision |
First of all: How can i upload in this forum an image? :D
Shouldn't it work with:

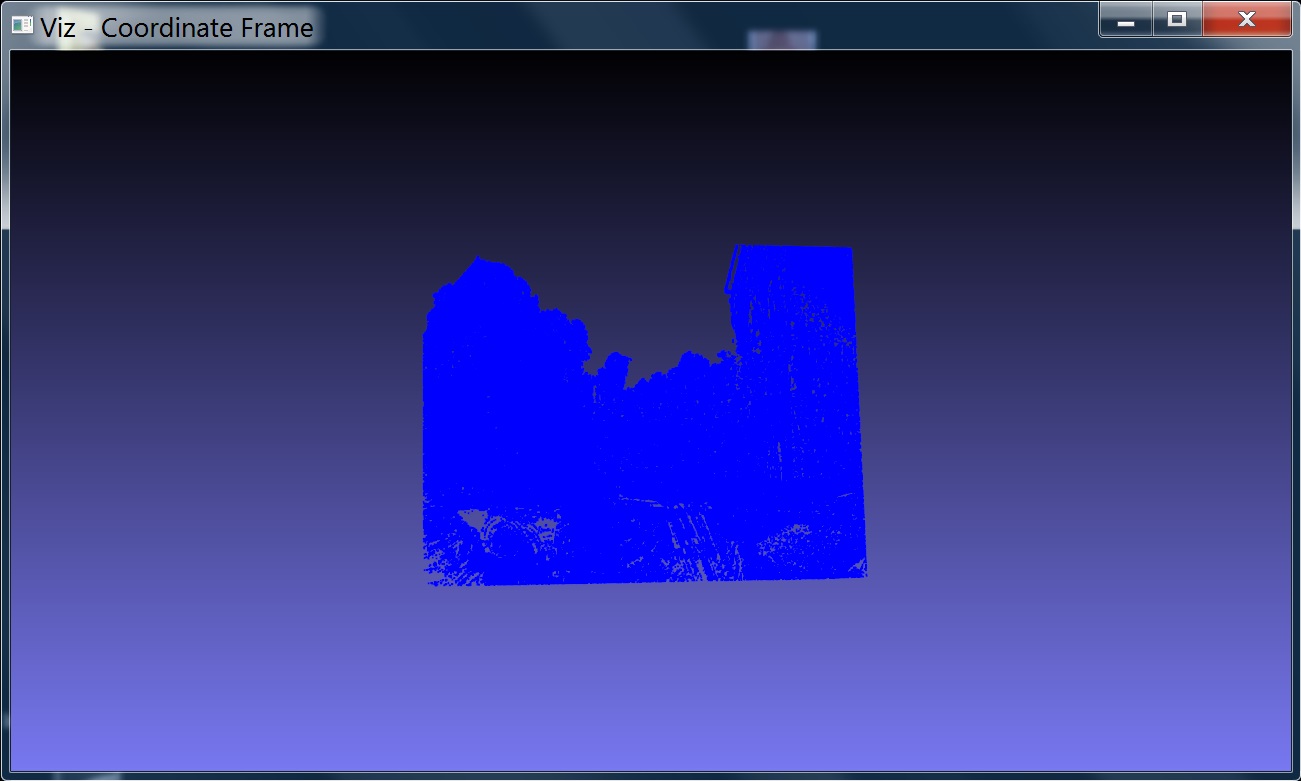
image:
?
| | 14 | No.14 Revision |
The Rectified Images:
The Disparity Map of the Rectified Images:
The Point Cloud of the Disparity Map (Two Views):
I'm not sure if my Disparity Map looks right... And the point cloud is obviously wrong... the point cloud is containing of many "slices"... Something in the Z-Coordinate is probably wrong?
| | 15 | No.15 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images:
The Point Cloud of the Disparity Map (Two Views):
I'm not sure if my Disparity Map looks right... And the point cloud is obviously wrong... the point cloud is containing of many "slices"... Something in the Z-Coordinate is probably wrong?
| | 16 | No.16 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images: Images (obtained with numDisparities=24, SADWindowSize=3):
The Point Cloud of the Disparity Map (Two Views):
I'm not sure if my Disparity Map looks right... And the point cloud is obviously wrong... the point cloud is containing of many "slices"... Something in the Z-Coordinate is probably wrong?
| | 17 | No.17 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):
The Point Cloud of the Disparity Map (Two Views): different views):
I'm not sure if my Disparity Map looks right... And the point cloud is obviously wrong... the point cloud is containing of many "slices"... Something in the Z-Coordinate is probably wrong?
| | 18 | No.18 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):
The Point Cloud of the Disparity Map (Two different views):
I'm not sure if my Disparity Map looks right... And the point cloud is obviously wrong... the point cloud is containing of many "slices"... Something in the Z-Coordinate is probably wrong?
| | 19 | No.19 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):
The Point Cloud of the Disparity Map (Two different views):
I'm not sure if my Disparity Map looks right...
And the point cloud is obviously wrong... the point cloud is containing consisting of many "slices"...
Something in the Z-Coordinate is probably wrong?
| | 20 | No.20 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):
The Point Cloud of the Disparity Map (Two different views):
I'm not sure if my Disparity Map looks right...
And the point cloud is obviously wrong... the point cloud is consisting of many "slices"...
"slices"...
Something in the Z-Coordinate is probably wrong?
| | 21 | No.21 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
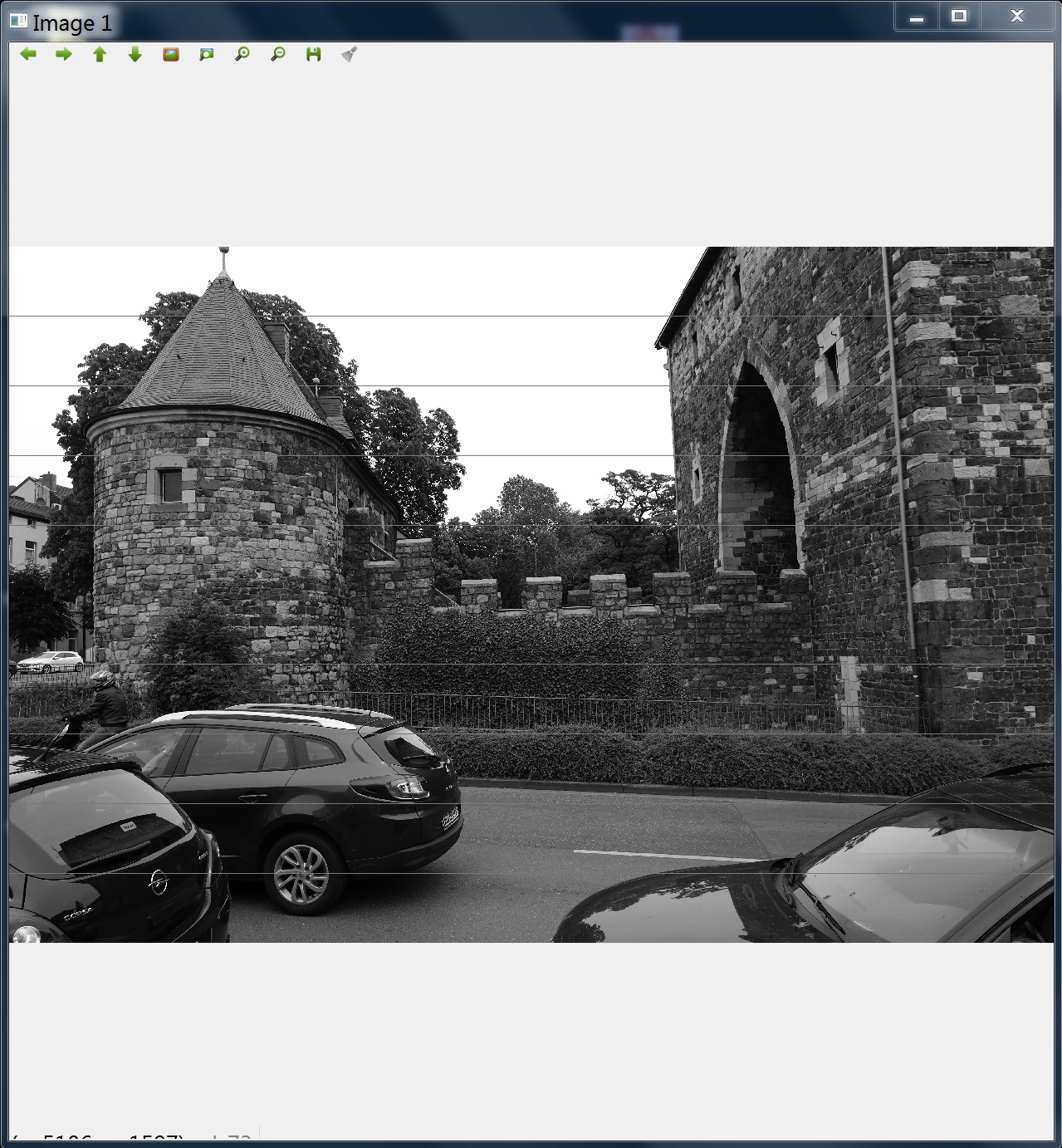
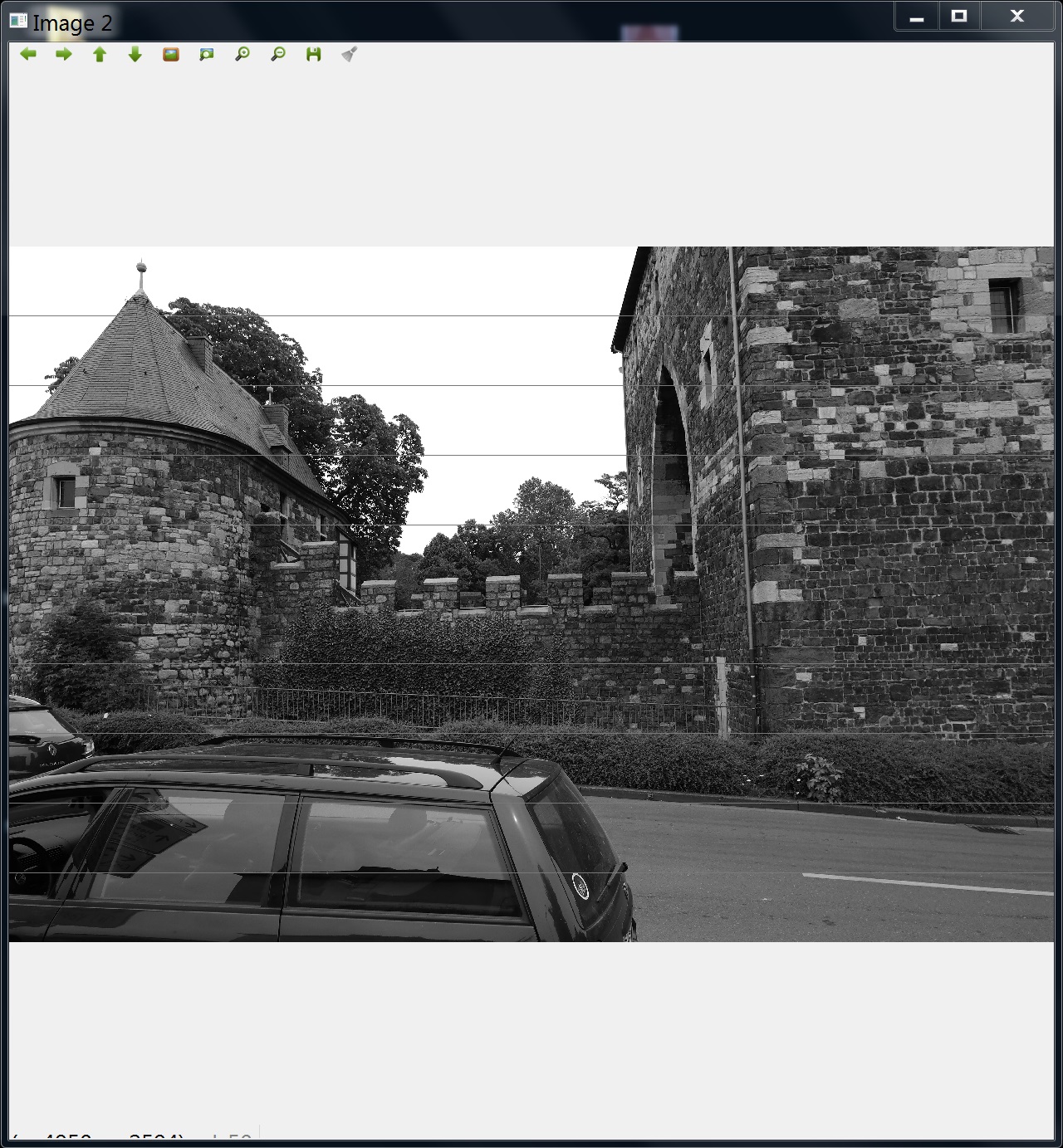
The Rectified Images:
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):
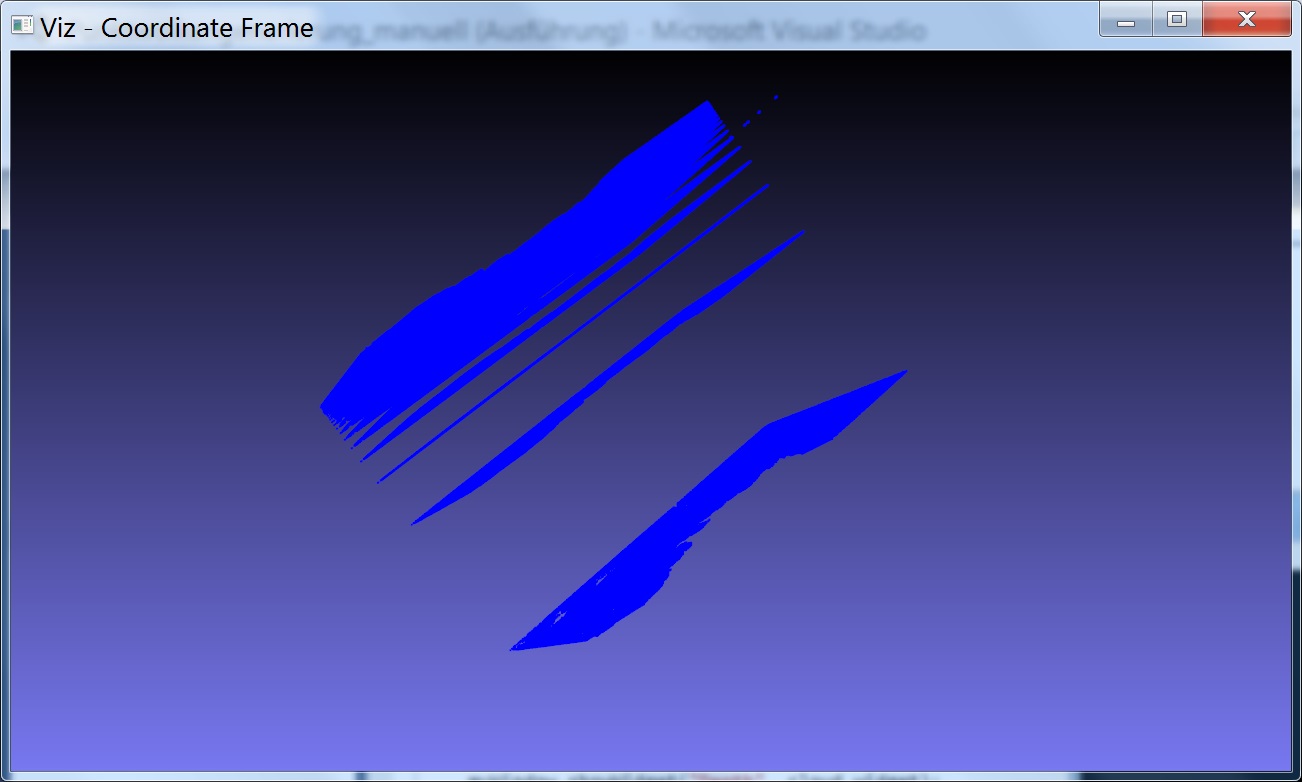
The Point Cloud of the Disparity Map (Two different views):
I'm not sure if my Disparity Map looks right...
And the point cloud is obviously wrong... the point cloud is consisting of many "slices"...
Something in the Z-Coordinate is probably wrong?
My disparity map pixel values have the range [0;23]... and there are about ~24 "slices" in the point cloud...
| | 22 | No.22 Revision |
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):
The Point Cloud of the Disparity Map (Two different views):
I'm not sure if my Disparity Map looks right...
And the point cloud is obviously wrong... the point cloud is consisting of many "slices"...
Something in the Z-Coordinate is probably wrong?
My disparity map pixel values have the range [0;23]... and there are about ~24 "slices" in the point cloud...
{kind=link}
{kind=link}