Is my Disparity Map wrong?
As i'm getting wrong point clouds, i would like to know my disparity map is right...
Below i'm showing the results of the steps from my workflow:
The Rectified Images:
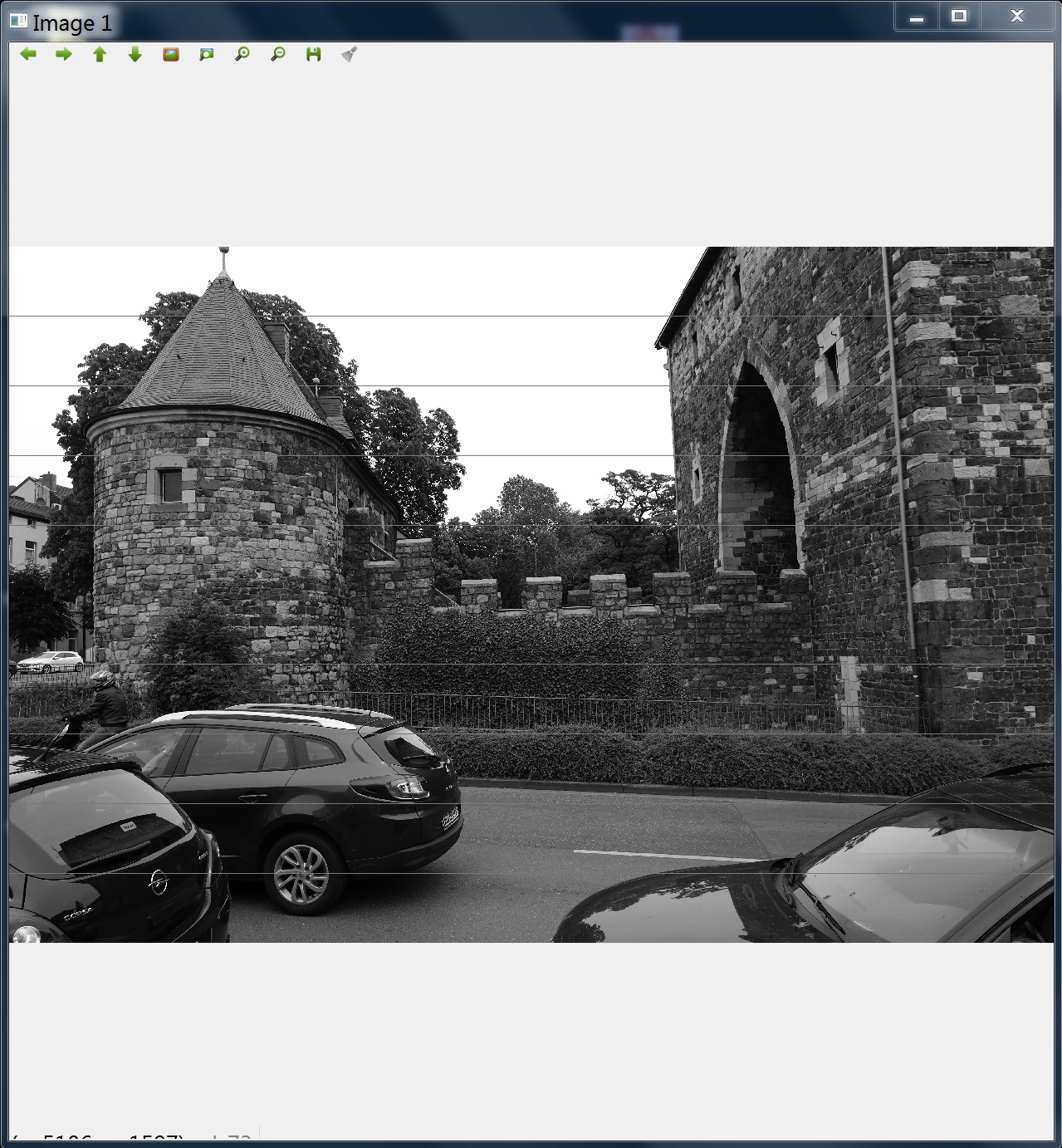
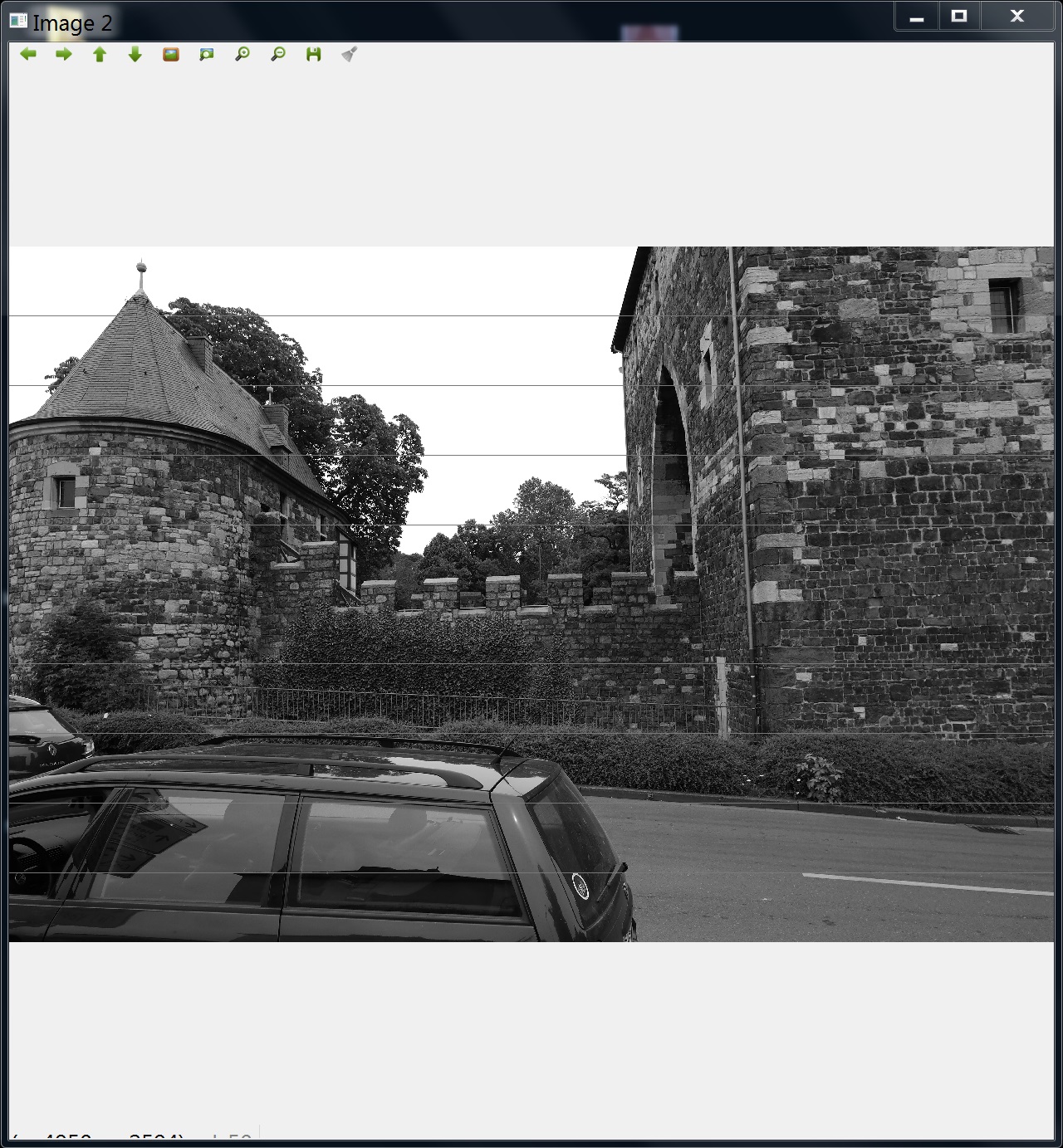
The Disparity Map of the Rectified Images (obtained with numDisparities=24, SADWindowSize=3):

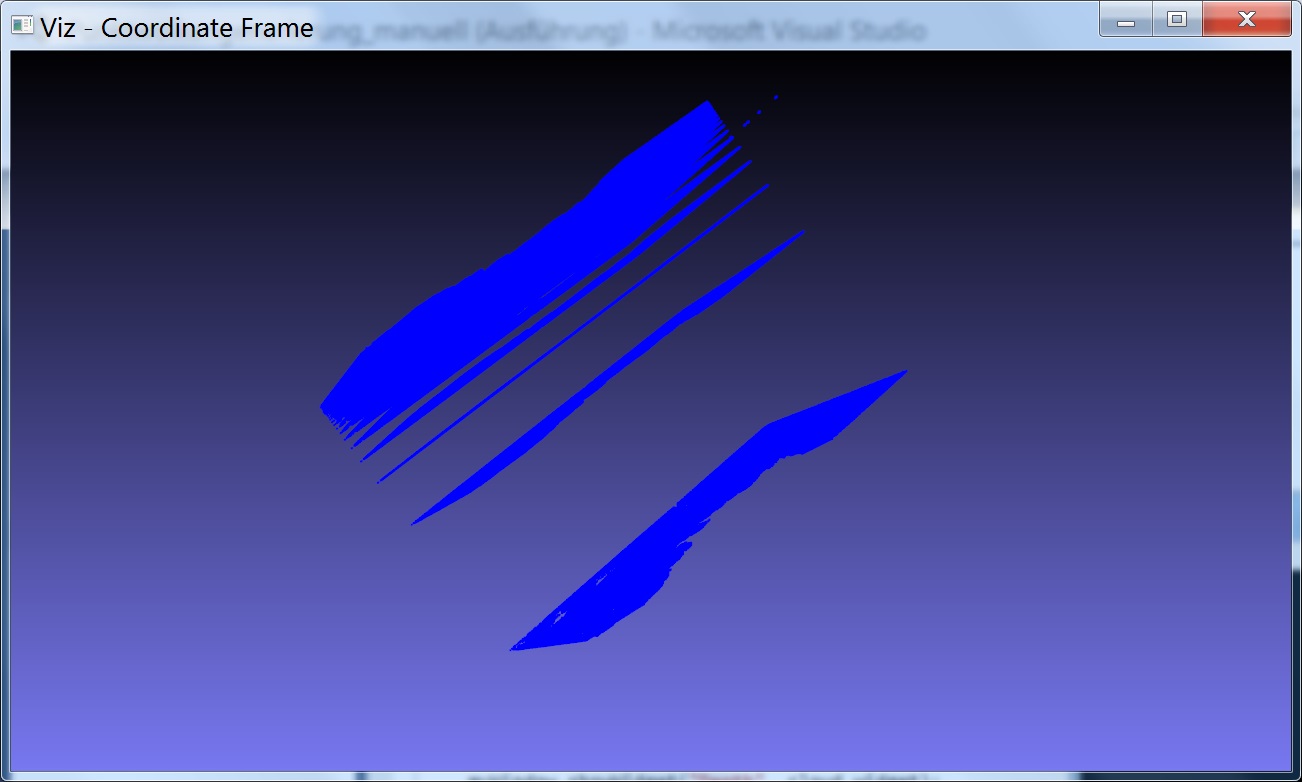
The Point Cloud of the Disparity Map (Two different views):
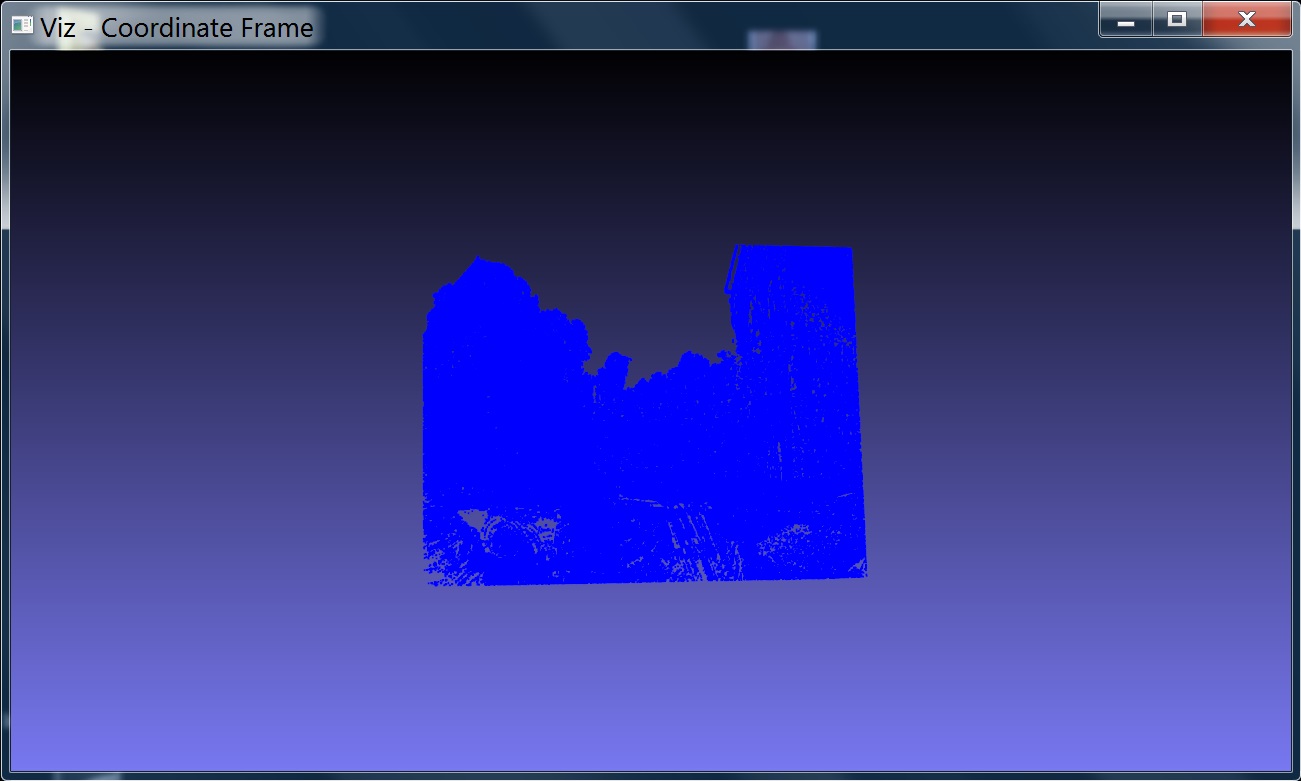
I'm not sure if my Disparity Map looks right...
And the point cloud is obviously wrong... the point cloud is consisting of many "slices"...
Something in the Z-Coordinate is probably wrong?
My disparity map pixel values have the range [0;23]... and there are about ~24 "slices" in the point cloud...
numDisparities=24 <-- means, you get 24 slices, so yes, that's expected.
Oh.. yes you are right.. i didn't think from this point of view..
But why the slides of my point cloud have that strange distance?
btw, above is without Q, right ?
It is... i made:
^^ ah, cool. now at least, we've got something, we can send "the next one" to ;)
but honestly, 3d from disparity is hard , even with a proper calibrated stereo rig (which you don't have).
and yea, your disparity looks like sh..t (it's not a problem with the viewer, or with your projection formula)
keep on experimenting, but rather try to simulate, what a stereo cam (or 2 human eyes) would see.
e.g. i think, your images are "too far apart", and the direction is not "parallel" enough (don't start me on the cars ...)
for comparison, here's a "nice" disparity image
may i ask, what your "use-case" is ?
for certain situations (small things, indoor) there are alternatives to block-matching (photogrammetric stereo, structured light, etc)
it should be used for an application similar to Google Streetview... so outdoor usage