Hello,
I am new to opencv and I am trying to undistort my camera's frames. I have used previously the callibration program from opencv to find the elements of the CameraMatrix and distCoeffs and I wrote the following program:
#include <string>
#include <iostream>
#include <opencv/cv.hpp>
using namespace std;
using namespace cv;
const int FRAME_WIDTH = 640;
const int FRAME_HEIGHT = 480;
int main()
{
Mat frame1, frame2,frame1undist;
double data[3][3];
double data2[5];
data[0][0] = 9.5327626068874099e+02;
data[0][1] = 0.0;
data[0][2] = 320.;
data[1][0] = 0.0;
data[1][1] = 9.5327626068874099e+02;
data[1][2] = 240.0;
data[2][0] = 0.0;
data[2][1] = 0.0;
data[2][2] = 1.0;
data2[0] = -1.1919013558906022e-01;
data2[1] = -2.9472820562856015e+00;
data2[2] = 0.0;
data2[3] = 0.0;
data2[4] = -1.9208489842061063e+01;
double avg_reprojection_error = 3.5640854681839190e-01;
Mat CameraMatrix(3,3,CV_64F,&data);
Mat NewCameraMatrix;
Mat distCoeffs(1,5,CV_64F,&data2);
Mat Result1, Result2;
double data3[3][3];
for (int i=0;i<3;i++){
for (int j=0;j<3;j++){
data3[i][j] = 0;
if(i==j) data[i][j] = 1;
}
}
//Mat R(3,3,CV_32FC1,&data3);
//initUndistortRectifyMap(CameraMatrix,distCoeffs,R,NewCameraMatrix,CvSize(FRAME_WIDTH,FRAME_HEIGHT),CV_32FC1,Result1,Result2);
VideoCapture capture(0);
if(!capture.isOpened()) return -1;
capture.set(CV_CAP_PROP_FRAME_WIDTH,FRAME_WIDTH);
capture.set(CV_CAP_PROP_FRAME_HEIGHT,FRAME_HEIGHT);
while(true){
capture.read(frame1);
//capture.read(frame2);
undistort(frame1,frame1undist,CameraMatrix,distCoeffs);
imshow("Frame 1",frame1);
imshow("Frame 1 undistored", frame1undist);
//imshow("Frame 2",frame2);
waitKey(21);
}
return 0;
}
The results can be seen in the following printscreen:
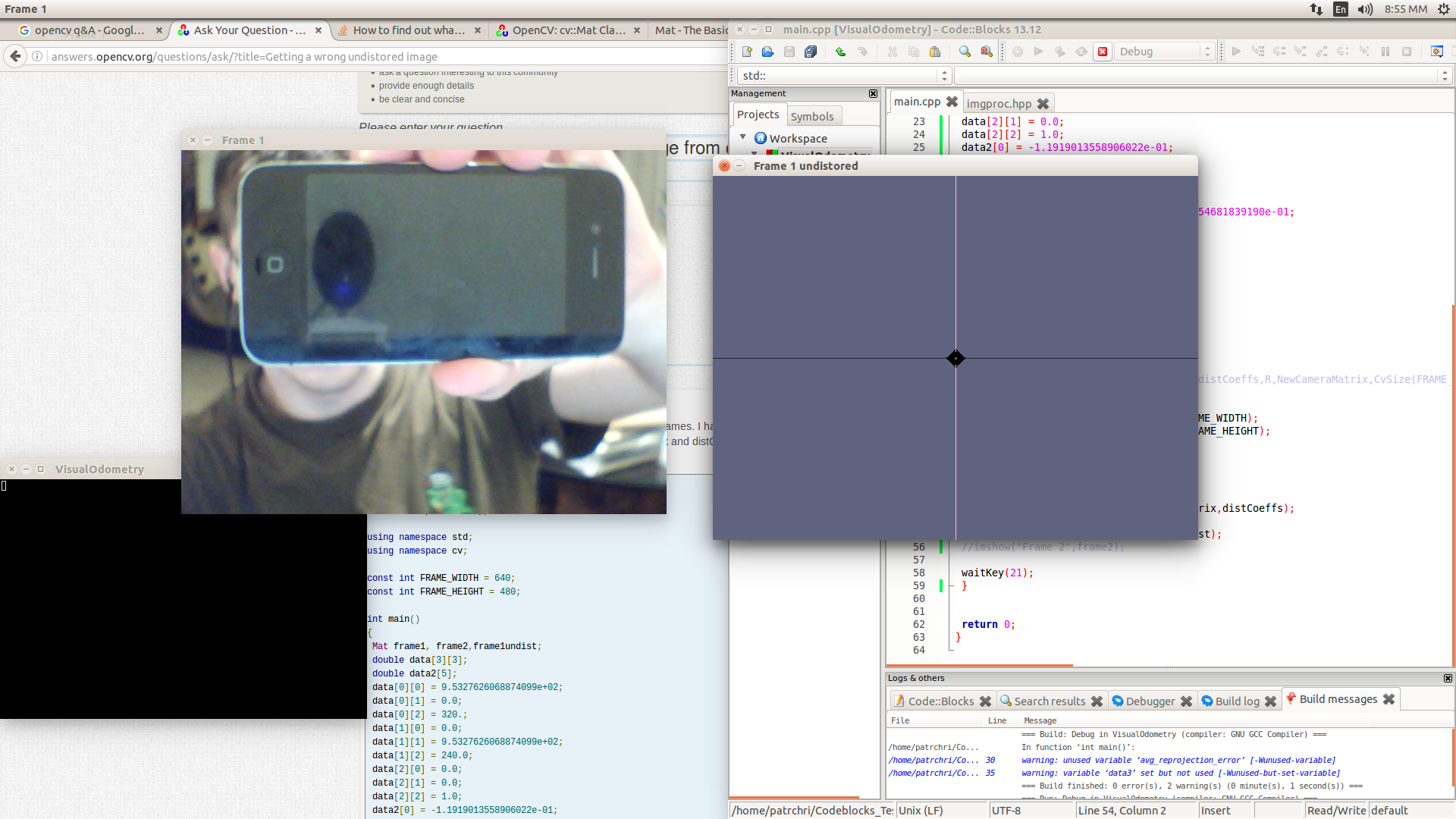
As you can see the undistorted frame is not even close to the "distorted" frame that I get from my camera and also it has some weird symbols on it, which disappear if I change the int _type in the Mat() functions that I use. I am quite confused on what is really going on, I thought maybe the int _type i use for the Mat function was the reason, but I don't know how could I fix that.
I am on Codeblocks at Ubuntu 14.04.
Thank you for your answers and for your time in advance,
Chris