i tried to implement a sample code just to be a starting point for a solution of your question.
could you try it and tell me your remarks. Maybe i will try to improve it or some ideas will raise.
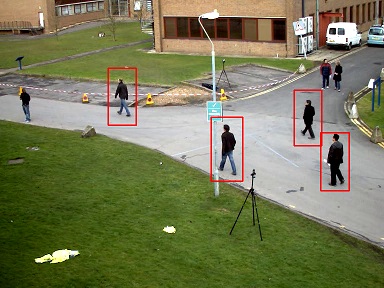
i tested it with 768x576.avi can be found OpenCV's \samples\data
( tracking is not implemented yet. my main idea was speeding up pedestrian detection )
for testing with OpenCV 2.4.x see Github Link
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include<opencv2/objdetect/objdetect.hpp>
#include "opencv2/video/background_segm.hpp"
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
char* filename = argc >= 2 ? argv[1] : (char*)"768x576.avi";
VideoCapture capture( filename );
//HOGDescriptor hog;
//hog.setSVMDetector(hog.getDefaultPeopleDetector());
HOGDescriptor hog( Size( 48, 96 ), Size( 16, 16 ), Size( 8, 8 ), Size( 8, 8 ), 9, 1, -1,
HOGDescriptor::L2Hys, 0.2, false, cv::HOGDescriptor::DEFAULT_NLEVELS);
hog.setSVMDetector( HOGDescriptor::getDaimlerPeopleDetector() );
Ptr<BackgroundSubtractor> bgS = createBackgroundSubtractorMOG2();
Mat frame,output;
while(true)
{
capture.read(frame);
if (!frame.data)
return 0;
if( frame.cols > 800 )
resize( frame, frame, Size(), 0.5, 0.5 );
bgS->apply(frame, output);
erode(output,output,Mat());
// Find contours
vector<vector<Point> > contours;
findContours( output, contours, RETR_LIST, CHAIN_APPROX_SIMPLE );
for ( size_t i = 0; i < contours.size(); i++)
{
Rect r = boundingRect( contours[i] );
if( r.height > 80 & r.width < r.height )
{
r.x -= r.width / 2;
r.y -= r.height / 2;
r.width += r.width;
r.height += r.height;
r = r & Rect( 0, 0, frame.cols, frame.rows );
Mat roi;
cvtColor( frame( r ), roi, COLOR_BGR2GRAY);
std::vector<Rect> rects;
if( roi.cols > hog.winSize.width & roi.rows > hog.winSize.height )
hog.detectMultiScale( roi, rects);
for (size_t i=0; i<rects.size(); i++)
{
rects[i].x += r.x;
rects[i].y += r.y;
rectangle( frame, rects[i], Scalar( 0, 0, 255 ), 2 );
}
}
}
imshow("display", frame);
if(waitKey(30)==27)
{
break;
}
}
return 0;
}
