get Center of nearby contours ??

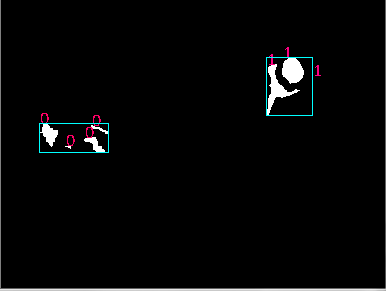
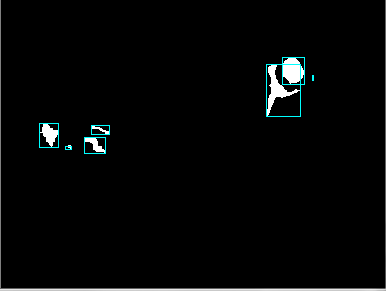
I am working on a project using OPENCV for some image processing. I been learning from examples, tutorials but I am new on opencv so I have a question. I have attached pictures (1) is original input (2) output for better understanding all of you. I have used dbscan algorithm for segmentation. My purpose is to detect multiple objects in an image and draw rectangle around them and give center point of each rectangle to track or know the position.
But after some image processing filters , effects, Background subtraction, Findcontours ... i have found center of all contours. and pass to merged_contour_points vector. But it draw rectangle around all contours. I Hope you understand.
Here are my codes;
#include "stdafx.h"
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace cv;
using namespace std;
#include <map>
#include <sstream>
template <class T>
inline std::string to_string (const T& t)
{
std::stringstream ss;
ss << t;
return ss.str();
}
class DbScan
{
public:
std::map<int, int> labels;
vector<Rect>& data;
int C;
double eps;
int mnpts;
double* dp;
//memoization table in case of complex dist functions
#define DP(i,j) dp[(data.size()*i)+j]
DbScan(vector<Rect>& _data,double _eps,int _mnpts):data(_data)
{
C=-1;
for(int i=0;i<data.size();i++)
{
labels[i]=-99;
}
eps=_eps;
mnpts=_mnpts;
}
void run()
{
dp = new double[data.size()*data.size()];
for(int i=0;i<data.size();i++)
{
for(int j=0;j<data.size();j++)
{
if(i==j)
DP(i,j)=0;
else
DP(i,j)=-1;
}
}
for(int i=0;i<data.size();i++)
{
if(!isVisited(i))
{
vector<int> neighbours = regionQuery(i);
if(neighbours.size()<mnpts)
{
labels[i]=-1;//noise
}else
{
C++;
expandCluster(i,neighbours);
}
}
}
delete [] dp;
}
void expandCluster(int p,vector<int> neighbours)
{
labels[p]=C;
for(int i=0;i<neighbours.size();i++)
{
if(!isVisited(neighbours[i]))
{
labels[neighbours[i]]=C;
vector<int> neighbours_p = regionQuery(neighbours[i]);
if (neighbours_p.size() >= mnpts)
{
expandCluster(neighbours[i],neighbours_p);
}
}
}
}
bool isVisited(int i)
{
return labels[i]!=-99;
}
vector<int> regionQuery(int p)
{
vector<int> res;
for(int i=0;i<data.size();i++)
{
if(distanceFunc(p,i)<=eps)
{
res.push_back(i);
}
}
return res;
}
double dist2d(Point2d a,Point2d b)
{
return sqrt(pow(a.x-b.x,2) + pow(a.y-b.y,2));
}
double distanceFunc(int ai,int bi)
{
if(DP(ai,bi)!=-1)
return DP(ai,bi);
Rect a = data[ai];
Rect b = data[bi];
/*
Point2d cena= Point2d(a.x+a.width/2,
a.y+a.height/2);
Point2d cenb = Point2d(b.x+b.width/2,
b.y+b.height/2);
double dist = sqrt(pow(cena.x-cenb.x,2) + pow(cena.y-cenb.y,2));
DP(ai,bi)=dist;
DP(bi,ai)=dist;*/
Point2d tla =Point2d(a.x,a.y);
Point2d tra =Point2d(a.x+a.width,a.y);
Point2d bla =Point2d(a.x,a.y+a.height);
Point2d bra =Point2d(a.x+a.width,a.y+a.height);
Point2d tlb =Point2d(b.x,b.y);
Point2d trb =Point2d(b.x+b.width,b.y);
Point2d ...add a comment