Corner detection after edge detection

I have used canny edge detection using the following code :
blur( src, src_gray, Size(3,3) );
Canny( src_gray, detected_edges, 20, 40, kernel_size );
dst = Scalar::all(0);
src.copyTo(dst,detected_edges);
This give me the right edged form , but if i use corner detection by taking the variable dst as input array for corner detection, i get exception although have converted dst to float type 32:
dst.convertTo(temp, CV_32FC1);
cornerHarris( temp, dst, blockSize, apertureSize, k, BORDER_DEFAULT );
normalize( dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() );
convertScaleAbs( dst_norm, dst_norm_scaled );
/// Drawing a circle around corners
for( int j = 0; j < dst_norm.rows ; j++ )
{
for( int i = 0; i < dst_norm.cols; i++ )
{
if( (int) dst_norm.at<float>(j,i) > thresh )
{
circle( dst_norm_scaled, Point( i, j ), 5, Scalar(0), 2, 8, 0 );
count++;
}
}
}
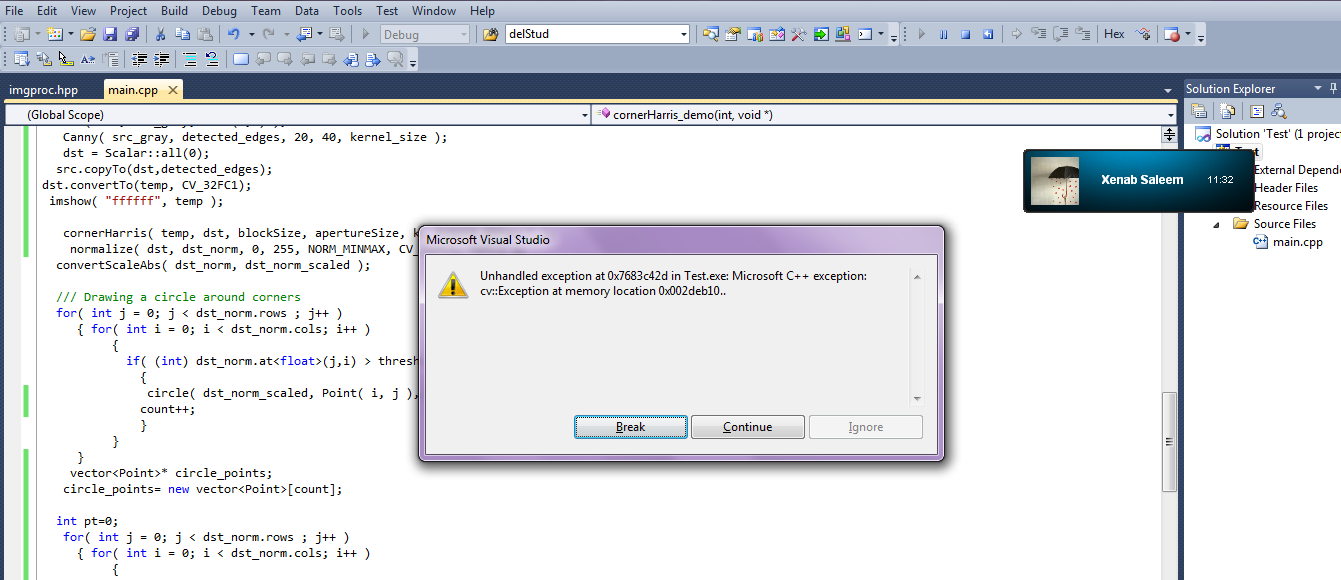
I m using visual studio and it shows something like this:
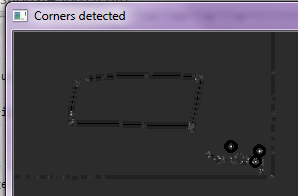
P.S: if i use the detected_edges variable instead of dst , i get no exception but wrong image: original image:

result:
SCREENSHOT Showing exception:
Mat dst, dst_norm, dst_norm_scaled;
//dst = Mat::zeros( src.size(), CV_32FC1 );
temp = Mat::zeros( src.size(), CV_32FC1 );
/// Detector parameters
int blockSize = 3;
int apertureSize = 3;
double k = 0.04;
blur( src_gray, detected_edges, Size(3,3) );
Canny( detected_edges, detected_edges, 20, 40, kernel_size );
dst = Scalar::all(0);
detected_edges.convertTo(detected_edges,CV_8U);
src.convertTo(src, CV_8UC1);
src.copyTo(dst,detected_edges);
try{
cornerHarris( dst, temp, blockSize, apertureSize, k, BORDER_DEFAULT );
/// Normalizing
normalize( temp, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() );
convertScaleAbs( dst_norm, dst_norm_scaled );
/// Drawing a circle around corners
for( int j = 0; j < dst_norm.rows ; j++ )
{ for( int i = 0; i < dst_norm.cols; i++ )
{
if( (int) dst_norm.at<float>(j,i) > thresh )
{
circle( dst_norm_scaled, Point( i, j ), 5, Scalar(0), 2, 8, 0 );
}
}
}
namedWindow( corners_window, CV_WINDOW_AUTOSIZE );
imshow( corners_window, dst_norm_scaled );
}
catch(Exception e)
{
e.err;
}
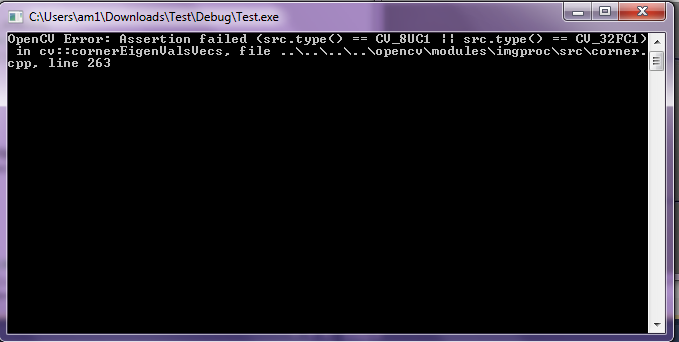
What is the exception?
Have you tried my answer? CV_8FC1 should be the problem, I think is the size of the image element.