findCirclesGrid NOT Working
Dear all,
I'm having problems with the function findCirclesGrid(): it never finds the circles and it returns always false.
This is the simple piece of code:
Mat imageMat = imread("Untitled.png");
Size patternsize(4,11);
vector<Point2f> centers;
bool found = findCirclesGrid( imageMat, patternsize, Mat(centers), CALIB_CB_ASYMMETRIC_GRID );
where Untitled.png is the following image http://robocraft.ru/files/opencv/acircles_pattern.png
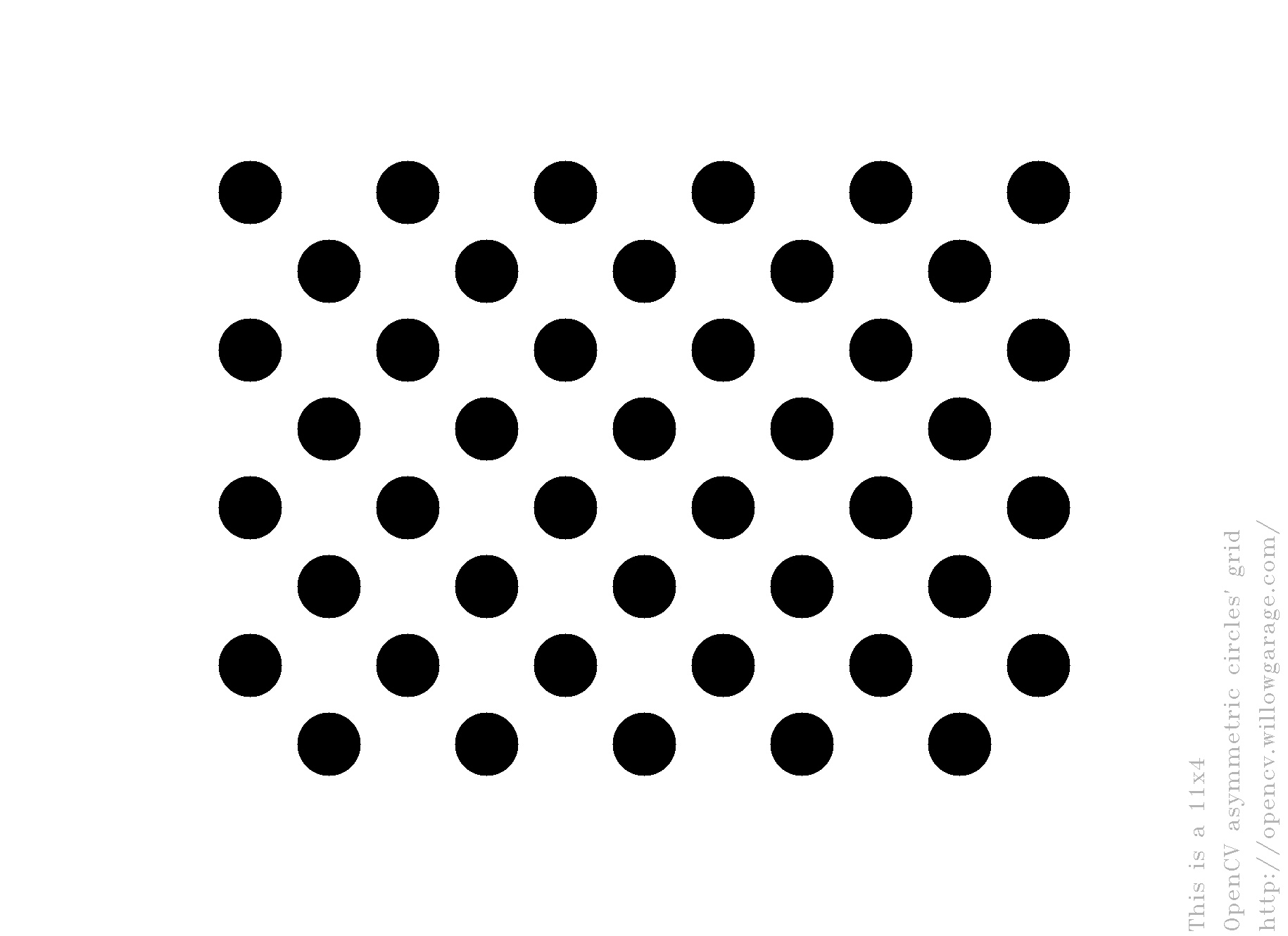{kind=link}
[OpenCV2.3 + Visual Studio 2010 + 64bit]
Any suggestions?
Thanks,
ALLL
The circlesgrid is a lot more sensitive to lighting differences than chessboard. We find that 25-35% of our images in a calibration sequence fail for no obvious reason.
@mgb Perhaps you should change parameters of a blob detector (see my answer below). In my experiments detection of the circle grid is more stable than chessboard.