This question is a bit old but user updated after year and recently I have had a similar problem. This case can be solved using brightness with few preprocessing threshold and contours. Here I would like to show that not always Hue is the way.
This is brightness after blur + equalization and its histogram:

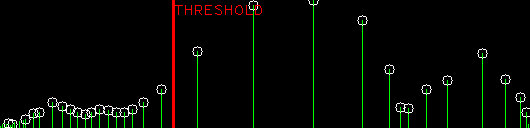
This is the final result after threshold and contours to select the tuna
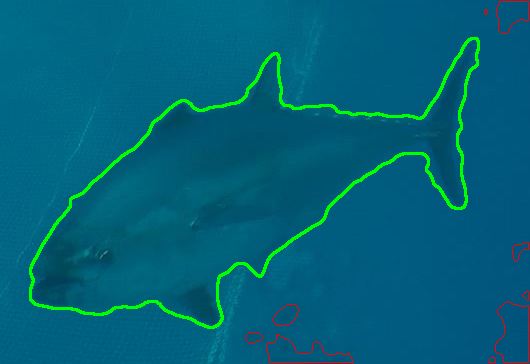
And this is the code. There is a semi-automatic threshold but we have good bins separation in histogram.
Play around params with trackbars.
#include <iostream>
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace std;
using namespace cv;
int useEqualize = 0;
int th1, blursSize;
const std::string winName = "Tuna fish";
cv::Mat src, dst;
cv::Mat brightness;
void onTunaFishTrackbar(int, void*)
{
cv::Mat hist, histImg, tmp;
brightness.copyTo(tmp);
if (blursSize >= 3)
{
blursSize += (1 - blursSize % 2);
cv::GaussianBlur(tmp, tmp, cv::Size(blursSize, blursSize), 0);
}
if (useEqualize)
cv::equalizeHist(tmp, tmp);
cv::imshow("Brightness Preprocess", tmp);
// threshold to select dark tuna
cv::threshold(tmp, tmp, th1, 255, cv::THRESH_BINARY_INV);
cv::imshow(winName, tmp);
// find external contours ignores holes in the fish
vector<vector<cv::Point> > contours;
vector<cv::Vec4i> hierarchy;
cv::findContours(tmp, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// draw all contours and select the largest
src.copyTo(dst);
double maxDim = 0;
int largest = -1;
for (int i = 0; i < contours.size(); i++)
{
// draw all contours in red
cv::drawContours(dst, contours, largest, cv::Scalar(0, 0, 255), 1);
int dim = contours[i].size(); //area is more accurate but more expensive
//double dim = contourArea(contours[i]);
//double dim = cvRound(arcLength(contours[i], true));
if (dim > maxDim)
{
maxDim = dim;
largest = i;
}
}
//The tuna as binary mask
cv::Mat fishMask = cv::Mat::zeros(src.size(), CV_8UC1);
//The tuna as contour
vector<cv::Point> theFish;
if (largest >= 0)
{
theFish = contours[largest];
// draw selected contour in bold green
cv::polylines(dst, theFish, true, cv::Scalar(0, 255, 0), 2);
// draw the fish into its mask
cv::drawContours(fishMask, contours, largest, 255, -1);
}
cv::imshow("Result Fish Mask", fishMask);
cv::imshow("Result Contour", dst);
}
int main(int argc, char* argv[])
{
src = cv::imread(argv[1]);
if (src.empty())
{
cout << endl
<< "ERROR! Unable to read the image" << endl
<< "Press a key to terminate";
cin.get();
return 1;
}
imshow(winName, src);
imshow("Src", src);
cvtColor(src, dst, COLOR_BGR2HSV);
vector<cv::Mat > hsv_planes;
split(dst, hsv_planes);
//hue = hsv_planes[0];
//saturation = hsv_planes[1];
brightness = hsv_planes[2];
// default settings for params
useEqualize = 1;
blursSize = 21;
th1 = 33.0 * 255 / 100; //tuna is dark than select dark zone below 33% of full range
cv::createTrackbar("Equalize", winName, &useEqualize, 1, onTunaFishTrackbar, 0);
cv::createTrackbar("Blur Sigma", winName, &blursSize, 100, onTunaFishTrackbar, 0);
cv::createTrackbar("Threshold", winName, &th1, 255, onTunaFishTrackbar, 0);
onTunaFishTrackbar(0, 0);
cv::waitKey(0);
return 0;
}



Preprocessing of underwater images is explained in this paper - https://www.ensta-bretagne.fr/jaulin/paper_bazeille_CMM06.pdf