Depth Discontinuities in GPU::BM and GPU::CSBP

I am interested in using the stereo correspondence algorithms in the GPU module (2.4.X). However, the results I am able to achieve are not useable as there are great errors at depth edges/discontinuities. My question is this: is there a way to achieve quality segmentation (sharp edges) at severe depth discontinuities in either the gpu::BM or gpu::CSBP? I know from reading the paper on CSBP that this is a problem inherent to the method and is supposedly fixed by using a bilateral or median filter.
How have you gotten the best results from the real-time parallel stereo methods (not BP)? How did you eliminate poor matches? What postprocessing steps did you follow?
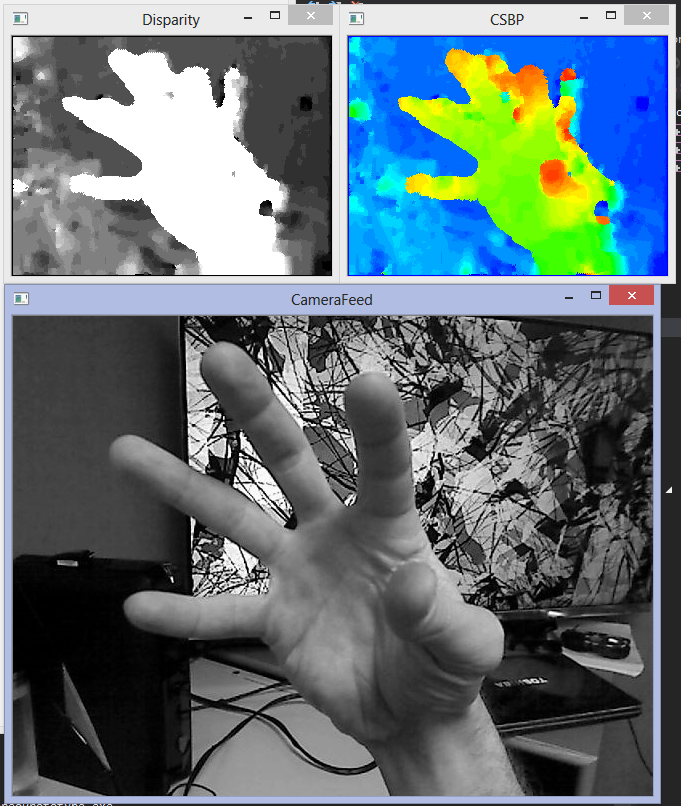
This is the disparity image I generate with CSBP (and some first attempts at filtering). Notice the absence of a depth 'shadow' where the disparity really shouldn't be estimated:
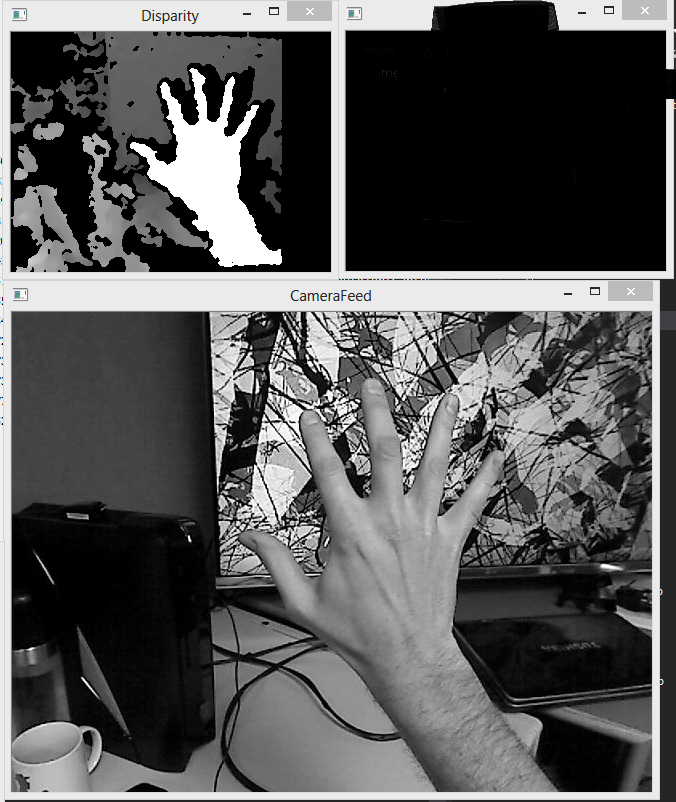
For comparison, see the quality of my results with SGBM:
Hi: Were you ever able to resolve this issue?
I think the solution would be to run the algorithm twice, matching once L to R and once R to L and then do a consistency check to eliminate bad matches/values. This would double the runtime, but is certainly worth a try.