Imprecise intrinsic/extrinsic calibration with Aruco markers
Hi,
I am still new with calibration using OpenCV. I have a setup right now which is composed of three similar cameras (same lens and sensor). Here the following arrangement of the camera, the measurements below are approximate. Rotation between the camera should be approximatively null.
Camera 1->2
- -380mm (+- 50mm) X axis
- -290mm (+- 50mm) Y axis
- -460mm (+- 50mm) Z axis
Camera 1->3
- -850mm (+- 10mm) X axis
- 0 mm (+- 50mm) Y axis
- 0 mm (+- 50mm) Z axis
Methodology
I did the intrinsic calibration for every camera using the code below. For every intrinsic, the returned error was around 1.5.
import pickle
import cv2
from cv2 import aruco as ar
ar_dict = ar.getPredefinedDictionary(ar.DICT_6X6_1000)
board = ar.GridBoard_create(markersX=6, markersY=9, markerLength=0.04,
markerSeparation=0.01, dictionary=ar_dict, firstMarker=108)
criteria = (cv2.TERM_CRITERIA_EPS & cv2.TERM_CRITERIA_COUNT, 10000, 1e-10)
flags = cv2.CALIB_RATIONAL_MODEL | cv2.CALIB_USE_INTRINSIC_GUESS | cv2.CALIB_FIX_TANGENT_DIST | cv2.CALIB_FIX_K5 | cv2.CALIB_FIX_K6
camera_matrix, distortion_coefficients0, _, _ = \
cv2.aruco.calibrateCameraAruco(data['corners'], data['ids'],
data['counter'], board, data['imsize'], cameraMatrix=data['cam_init'],
distCoeffs=data['dist_init'], flags=flags, criteria=criteria)
Here's the output intrinsic I got for camera 1 and 2 respectively. Focal lens of the lens is 2.8mm iwht sensor pixel of 3 microns and sensons dimension of 1208hx1928w:
camera matrix: [[ 951.48868149 0. 974.18640697]
[ 0. 949.82336112 615.18242086]
[ 0. 0. 1. ]]
distortion: [[ 2.47752302e-01 -1.35352132e-02 0.00000000e+00 0.00000000e+00
5.26418500e-04 6.09717199e-01 0.00000000e+00 0.00000000e+00
0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00
0.00000000e+00 0.00000000e+00]]
camera matrix: [[ 964.28616544 0. 961.13919655]
[ 0. 962.12057895 581.30821674]
[ 0. 0. 1. ]]
distortion: [[ 0.34504854 -0.02941867 0. 0. 0.00217154 0.69914104
0. 0. 0. 0. 0. 0.
0. 0. ]]
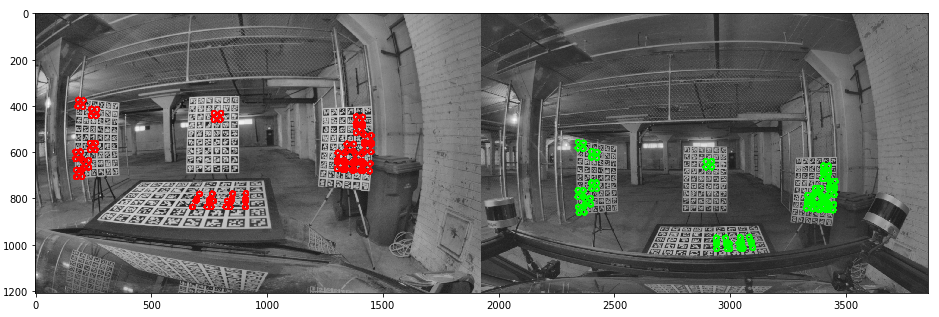
For extrinsic calibration, I am using four Aruco charts as shown in the images below where I colored the detected image points.
Here's the code I am using for extrinsic calibration.
rot = np.eye(3, dtype=np.float64)
essential = np.eye(3, dtype=np.float64)
fondamental = np.eye(3, dtype=np.float64)
tvec = np.zeros((3, 1), dtype=np.float64)
flags = cv2.CALIB_FIX_INTRINSIC | cv2.CALIB_RATIONAL_MODEL
criteria = (cv2.TERM_CRITERIA_EPS & cv2.TERM_CRITERIA_COUNT, 10000, 1e-10)
ret = cv2.stereoCalibrate(ext_calib12['obj_pts'], ext_calib12['img_pts'][0], ext_calib12['img_pts'][1],
int_calib1['est_cam_mat'], int_calib1['est_dist'],
int_calib2['est_cam_mat'], int_calib2['est_dist'],
int_calib1["imsize"], rot, tvec, essential,
fondamental, flags=flags, criteria=criteria)
Then to validate the result of my calibration I am doing the rectification of the image as follow
imsize = int_calib1["imsize"]
R1 = np.eye(3)
R2 = np.eye(3)
Q = np.eye(4)
P1 = np.ones((3, 4))
P2 = np.ones((3, 4))
res = cv2.stereoRectify(int_calib1['est_cam_mat'], int_calib1['est_dist'],
int_calib2['est_cam_mat'], int_calib2['est_dist'], imsize, rot,
tvec, R1, R2, P1, P2, Q, alpha=-1, flags=cv2.CALIB_ZERO_DISPARITY)
img = ext_calib12['img1']
mapx, mapy = cv2.initUndistortRectifyMap(int_calib1['est_cam_mat'], int_calib1['est_dist'], R1, P1, imsize, 5)
dst1 = cv2.remap(img, mapx, mapy, cv2.INTER_LINEAR)
img = ext_calib12['img2']
mapx, mapy = cv2.initUndistortRectifyMap(int_calib2['est_cam_mat'], int_calib2['est_dist ...
The issue is that the tags appear too small in the images and too few are detected. You will need to have points that cover a large part of the image.
Try with bigger tags or use regular calibration pattern (chessboard or asymmetric circles grid).