Finding depth of an object using 2 cameras
Hi, I am new to stereo imaging and learning to find depth of an object.
I have 2 cameras kept separately looking at a cardboard surface.
Given :
- 8 points marked on the cardboard surface.
- Captured one image each from both the camera.
- Identified (x,y) coordinates of all 8 points in both the images.
Problem : Find the depth of each point i.e. distance of each point from the cameras.
I tried solving it using following approach but I got weird result :
- Noted down 8 common points from both the left and right images captured from 2 different cameras.
- Determined Fundamental Matrix between both the images using 8 points.
- The fundamental matrix F relates the points on the image plane of one camera in image coordinates (pixels) to the points on the image plane of the other camera in image coordinates
- Opencv Function : cv::findFundamentalMat()
- Input to the function : 8 common points from both the image
- Output = Fundamental matrix of 3x3
- Performed stereo rectification
- It reprojects the image planes of our two cameras so that they reside in the exact same plane, with image rows perfectly aligned into a frontal parallel configuration.
- Opencv Function : cv::stereoRectifyUncalibrated()
- Input to the function : 8 common Points from the images and fundamental matrix
- Output = Rectification matrices H1 and H2 for both the images.
Determined depth of a point
- Trying to find the depth of a point which is aprox. 39 feet (468 inches) away from the camera.
- Formula to find depth is Z = (f * T) / (xl – xr)
- Z is depth, f is focal lenth, T is distance between camera, xl and xr are x coordinate of a point on left image and right image respectively.
Following are the values taken for the variables :
- f = From the determined camera intrinsic of the camera, I got fx and fy. So I found out f = sqrt(fxfx + fyfy)
- T = 2 cameras are kept apart 36 feet i.e. 432 inches. So, I gave T = 432
- xl and xr are x values of the point from left and right images which are perspective transformed using rectification matrices H1 and H2.
But I got very weird result. You can look at the screenshot of my experimentation and result.
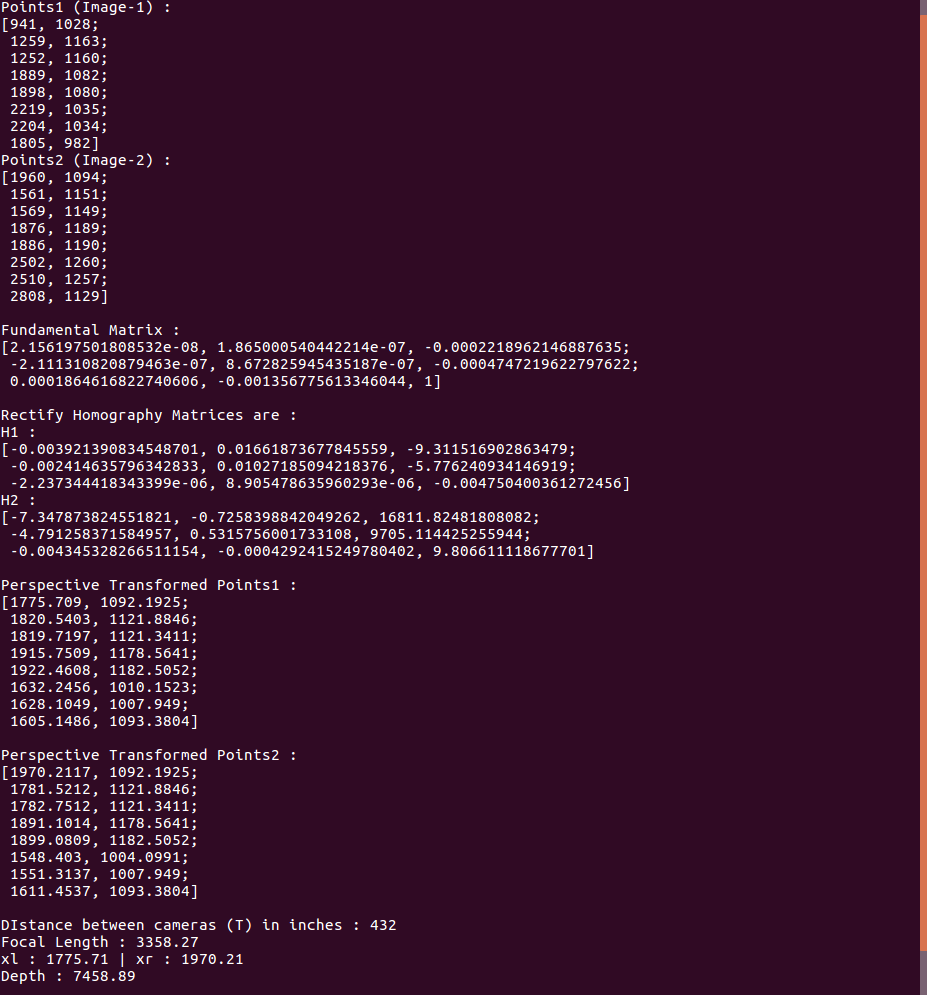
So could someone tell me the approach I am taking is right or wrong ?
add a comment