Why do overlapping blob detection key points occur? [closed]
Hi, I'm fairly new to using OpenCV with C++ and I've been toying around with the blob detection algorithm.
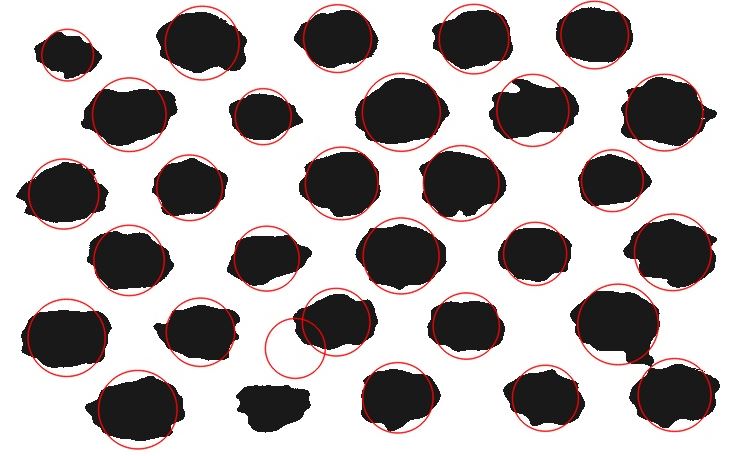
I noticed that there is one particular key point that basically is overlapping with another one really closely.
Is there any explanation as to why this occurs?
Here is the code for the parameters I have set and calling up the detector itself, the images are captured via a RealSense camera:
//Blob Detection Setup
SimpleBlobDetector::Params params;
//Area filter
params.filterByArea = true;
params.minArea = 500; //used to filter out specks
params.maxArea = 3000000; //this is just an arbitrarily very high number to exceed the default cap
//Circularity filter
params.filterByCircularity = false;
//Convexity filter
params.filterByConvexity = false;
//Inertia filter
params.filterByInertia = false;
Ptr<SimpleBlobDetector> standard_detector = SimpleBlobDetector::create(params);
vector<KeyPoint> standard_keypoints;
standard_detector->detect(standard_im_inv, standard_keypoints);
int objCount = size(standard_keypoints);
Mat standard_im_with_keypoints;
drawKeypoints(standard_im_inv, standard_keypoints, standard_im_with_keypoints, Scalar(0, 0, 255), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);

Please post your code.