@sturkmen
I have solved this issue following.
The first I have using FastLineDetector/LineSegmentDetector
Above two class has Implementation of merging line segments by TAVARES and PADILHA
Ptr<FastLineDetector> detector;
vector<Vec4i> lines;
detector->detect(grayscale, lines);
Remove small lie if we want.
vector<Vec4i> linesSmall;
copy_if (lines.begin(), lines.end(), back_inserter(linesWithoutSmall), [](Vec4f line){
float length = sqrtf((Point 1, Point 2);
return length > 50;// replace we want to filter.
});
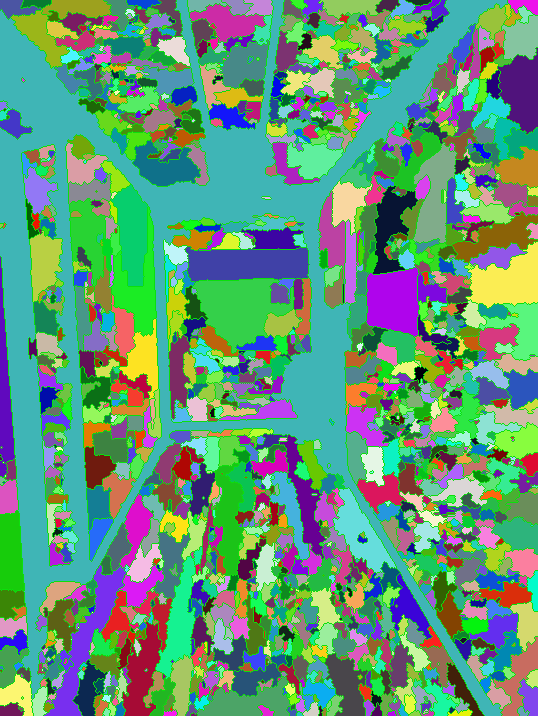
Split your lines using cv::partition. You need to specify a good predicate function. It really depends on the lines which you extract from an image, but I think it should check the following conditions:
- The angle between lines should be quite small (less 3 degrees, for example). Use the dot product to calculate angle's cosine.
The distance between the centers of segments should be less than half of the maximum length of two segments.
vector<int> labels;
int equilavence = partition(linesSmall, labels, {
Extend lines by percentage of line width
float len1 = calculator length of the line using hypot (have in cmath)
float len2 = calculator length of the line using hypot (have in cmath)
Append line if needed using fit line using least-squares problems.
Vec2f lineAfetFit = solve(...)
Vec4i el1 = append line 1;
Vec4i el2 = append line 2;
reject the lines that have wide difference in angles
float a1 = atan(solve(...));
float a2 = atan(solve(...));
if(fabs(a1 - a2) > maxAngleDiff * M_PI / 180.0){
return false;
}
Finds coordinates of perpendicular lines with length d in both line points
https://math.stackexchange.com/a/2043...
vector<point2i> boundingLine;
after calculating the window around the extended line
at least one point needs to inside extended bounding rectangle of other lines.
using https://docs.opencv.org/3.4.3/d3/dc0/group__imgproc__shape.html#ga1a539e8db2135af2566103705d7a5722
pointPolygonTest(boundingLine, ,...,...);
});
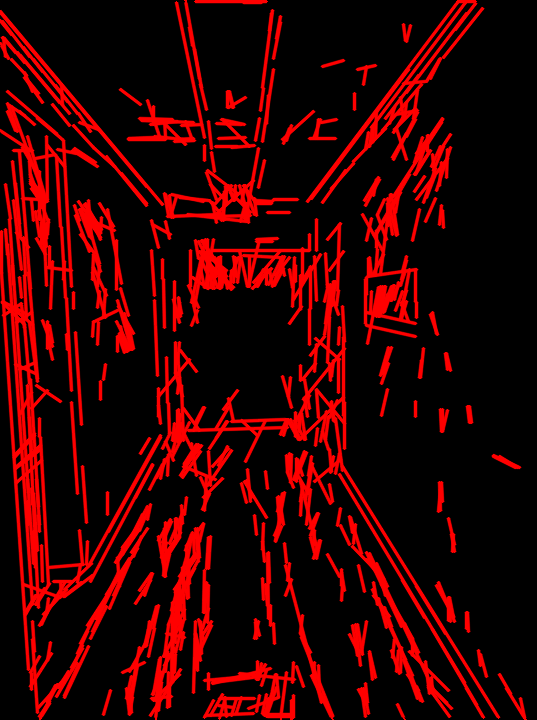
Draw original detected lines
for (int i = 0; i < linesSmall.size(); i++){
Vec4i& line = linesSmall[i];
line(img,
Point(line[0], line[1]),
Point(line[2], line[3]), colors[labels[i]], 2);
}
Build point out of each equivalence classes
vector<vector<point2i>> pointOut(equilavence);
for (int i = 0; i < linesSmall.size(); i++){
Vec4i& line = linesSmall[i];
pointOut[labels[i]].push_back(Point2i(line[0], line[1]));
pointOut[labels[i]].push_back(Point2i(line[2], line[3]));
}
The fit line to each equivalence class point out
Using fitLine() pointOut
vector<Vec4i> fittedLines = fitLine(...);
Finished to draw lines after fitting
for(Vec4i line: fittedLines){
line();
}
Result



The HoughLinesP is the way to go. Just check the parameters. If you want to detect ling lines, then set the
minLineLengthparameter to something bigger (100-150 instead of 15). Use a higher threshold value, too. You can lower the size of the accumulator space to avoid double line detections.I have config some value, the result is good, but. In my case. I want to detect the edges of the wall after measuring the length of its.
How to merge some line to one line? (look like fitLine method).
Also, before applying the HoughLinesP, like suggested by @kbarni, cleanup your image. There is a lot of noise that can be removed with morphological operations.
you can try lsd_lines.cpp instead of
HoughLines. it produces better lines to be refinedThank you @sturkmen. I have used it. Is very good.
you can post your own answer if you solved the problem.