R200 Depth stream on opencv
Hello
I am working with the RealSense R200 camera using Visual Studio(c++) and opencv. I need to use OpenCV to do image processing so I converted the PXCImage * into cv::Mat. But, as you can see, the two images are different.
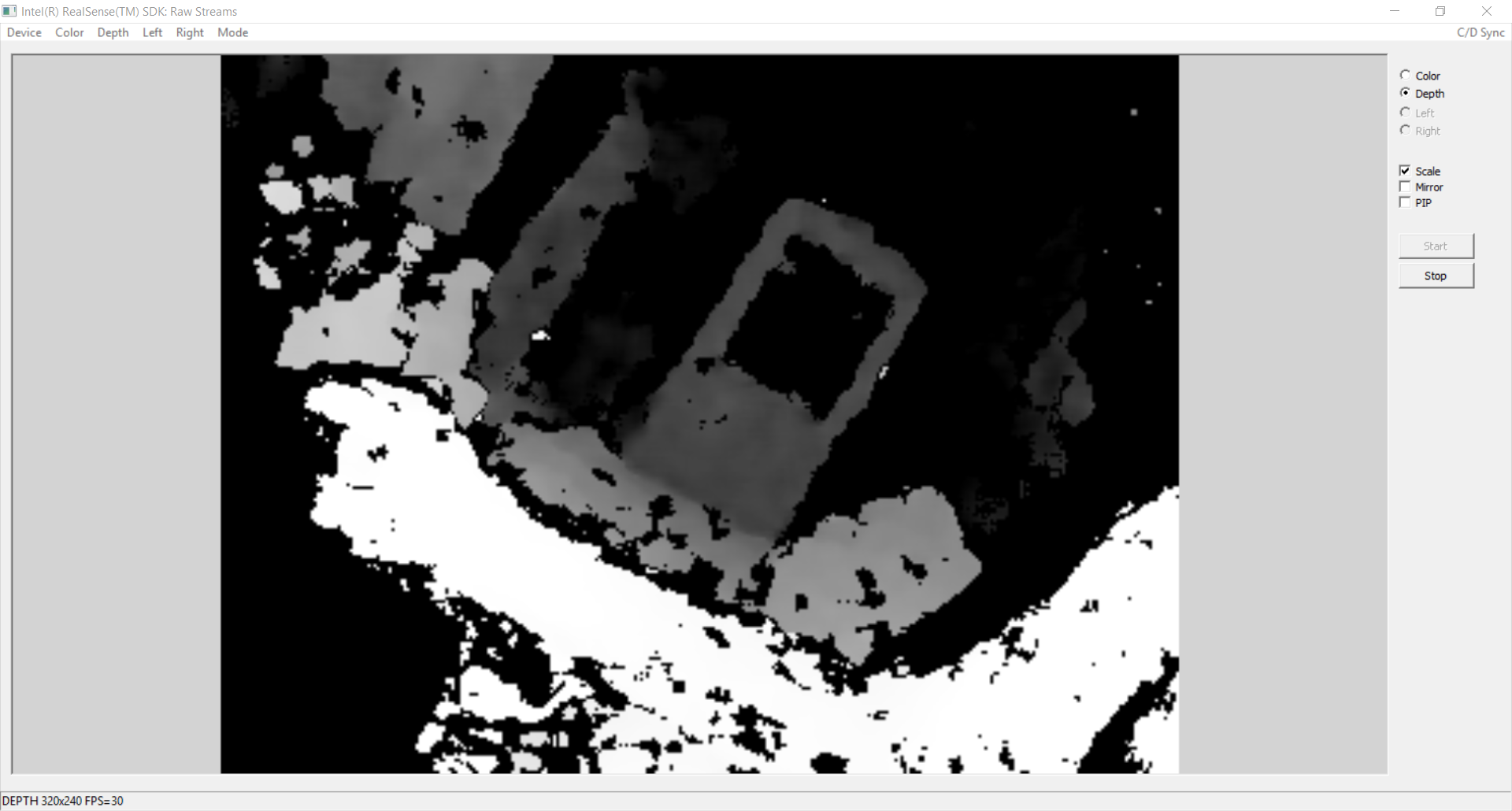
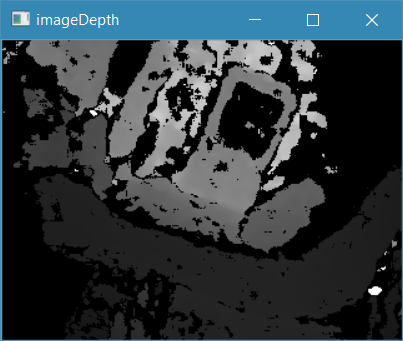
My main problem is each pixel in my image when object closer camera it show black but in demo it show white.
Does anybody can help me?
Demo in realsense:
Result of my code use opencv:
void main() {
Mat imageColor;
Mat imageDepth;
// Create a PXCSenseManager instance
PXCSenseManager *sm = PXCSenseManager::CreateInstance();
// Select the color stream
sm->EnableStream(PXCCapture::STREAM_TYPE_COLOR, 640, 480, 30);
sm->EnableStream(PXCCapture::STREAM_TYPE_DEPTH, 320, 240, 30);
// Initialize and Stream Samples
sm->Init();
for (;;) {
// This function blocks until a color sample is ready
if (sm->AcquireFrame(true)<PXC_STATUS_NO_ERROR) break;
// retrieve the sample
PXCCapture::Sample *sample = sm->QuerySample();
if (sample->color != NULL) {
ConvertPXCImageToOpenCVMat(sample->color, &imageColor);
namedWindow("imageColor", CV_WINDOW_AUTOSIZE);
imshow("imageColor", imageColor);
}
if (sample->depth != NULL) {
ConvertPXCImageToOpenCVMat(sample->depth, &imageDepth);
imageDepth.convertTo(imageDepth, CV_8U, 255.0 / 4096.0);
namedWindow("imageDepth", CV_WINDOW_AUTOSIZE);
imshow("imageDepth", imageDepth);
}
if (waitKey(1) >= 0) break;
sm->ReleaseFrame();
}
// Close down
sm->Release();
}
//ConvertPXCImageToOpenCVMat From https://stackoverflow.com/questions/37266390/how-to-convert-realsense-rgb-frame-to-cvmat-in-ubuntu-or-other-linux-env
void ConvertPXCImageToOpenCVMat(PXCImage *inImg, Mat *outImg) {
int cvDataType;
int cvDataWidth;
PXCImage::ImageData data;
inImg->AcquireAccess(PXCImage::ACCESS_READ, &data);
PXCImage::ImageInfo imgInfo = inImg->QueryInfo();
switch (data.format) {
/* STREAM_TYPE_COLOR */
case PXCImage::PIXEL_FORMAT_YUY2: /* YUY2 image */
case PXCImage::PIXEL_FORMAT_NV12: /* NV12 image */
throw(0); // Not implemented
case PXCImage::PIXEL_FORMAT_RGB32: /* BGRA layout on a little-endian machine */
cvDataType = CV_8UC4;
cvDataWidth = 4;
break;
case PXCImage::PIXEL_FORMAT_RGB24: /* BGR layout on a little-endian machine */
cvDataType = CV_8UC3;
cvDataWidth = 3;
break;
case PXCImage::PIXEL_FORMAT_Y8: /* 8-Bit Gray Image, or IR 8-bit */
cvDataType = CV_8U;
cvDataWidth = 1;
break;
/* STREAM_TYPE_DEPTH */
case PXCImage::PIXEL_FORMAT_DEPTH: /* 16-bit unsigned integer with precision mm. */
case PXCImage::PIXEL_FORMAT_DEPTH_RAW: /* 16-bit unsigned integer with device specific precision (call device->QueryDepthUnit()) */
cvDataType = CV_16U;//cv16u
cvDataWidth = 2;
break;
case PXCImage::PIXEL_FORMAT_DEPTH_F32: /* 32-bit float-point with precision mm. */
cvDataType = CV_32F;
cvDataWidth = 4;
break;
/* STREAM_TYPE_IR */
case PXCImage::PIXEL_FORMAT_Y16: /* 16-Bit Gray Image */
cvDataType = CV_16U;
cvDataWidth = 2;
break;
case PXCImage::PIXEL_FORMAT_Y8_IR_RELATIVE: /* Relative IR Image */
cvDataType = CV_8U;
cvDataWidth = 1;
break;
}
// suppose that no other planes
if (data.planes[1] != NULL) throw(0); // not implemented
// suppose that no sub pixel padding needed
if (data.pitches[0] % cvDataWidth != 0) throw(0); // not implemented
outImg->create(imgInfo.height, data.pitches[0] / cvDataWidth, cvDataType);
memcpy(outImg->data, data.planes[0], imgInfo.height*imgInfo.width*cvDataWidth * sizeof(pxcBYTE));
inImg->ReleaseAccess(&data);
}
Black and white what does it mean? can you give some pixel values at (128,128) (200,200.... in both case?
Sorry.I don't know what it's called. In demo picture if any object is closer or near camera it's show white but in my picture it's show dark;