Can not distinguish two insects by using SIFT
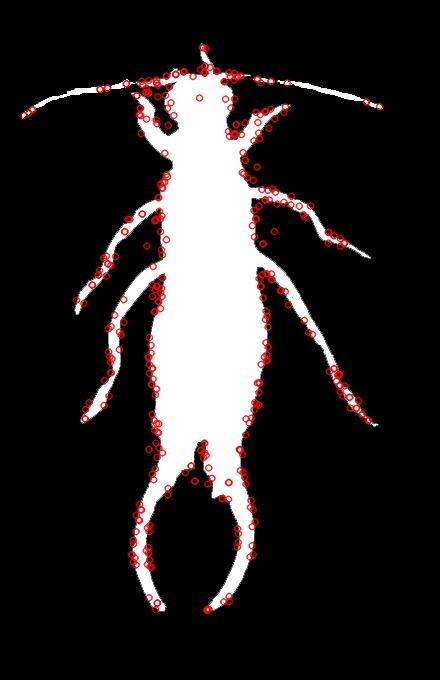
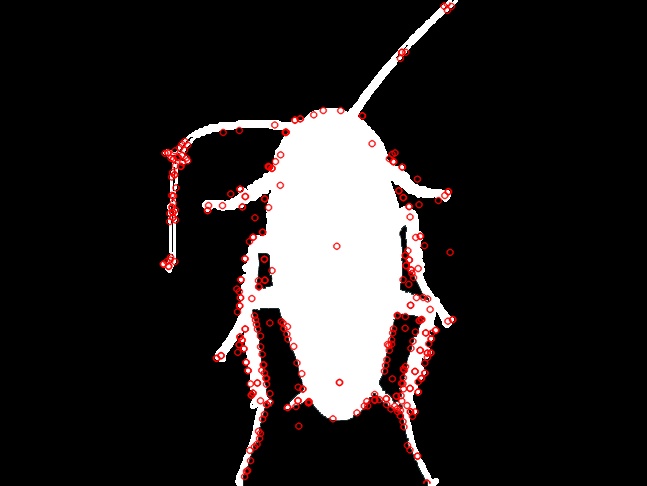
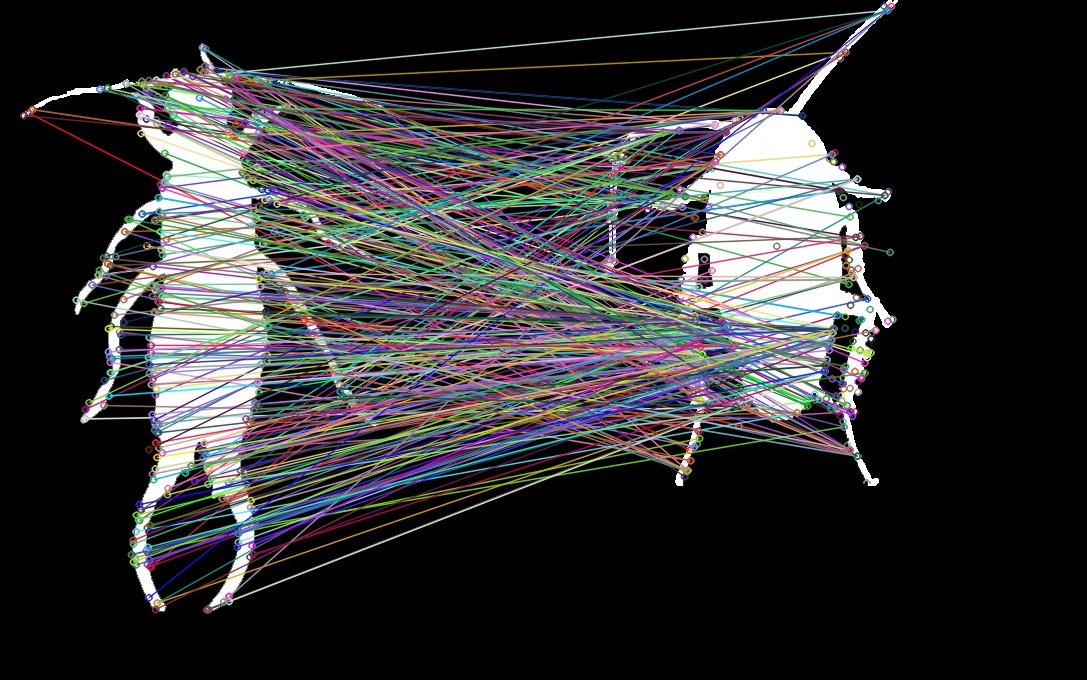
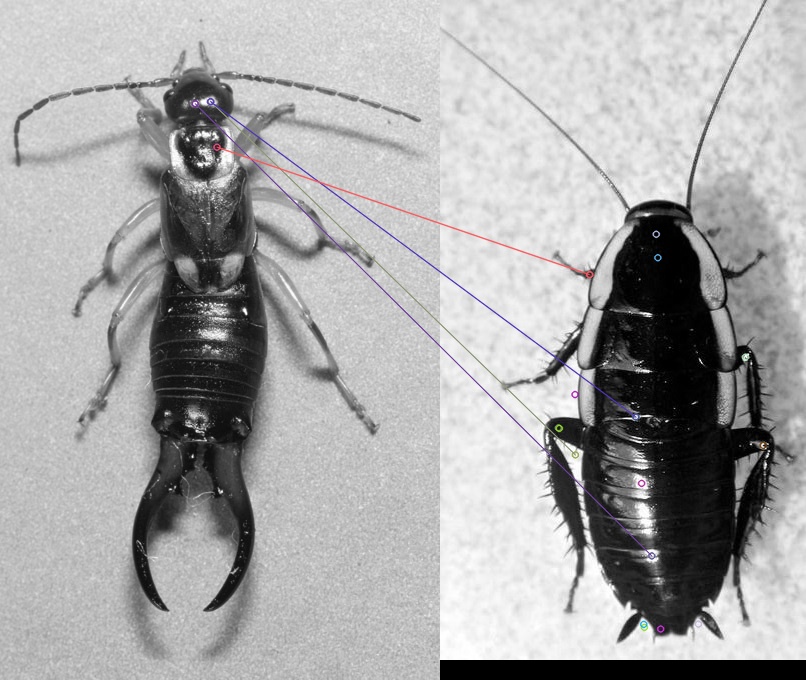
I wan to create a classifier in order to identify an insect by its captured image. At the first time, I used HuMomemnts but images captured in different resolutions gave incorrect results since HuMoments are scale variant. After doing some search on the internet, I found that usage SIFT and SURF can solve my problem and thus, I tried to see what happens when I use SIFT. The first two images below belongs to to different insect kind. The results was bizarre since all features out of 400 were matching (see 3rd image).
int main()
{
Mat src = imread(firstInsect);
Mat src2 = imread("secondInsect");
if(src.empty() || src2.empty())
{
printf("Can not read one of the image\n");
return -1;
}
//Detect key point in the image
SiftFeatureDetector detector(400);
vector<KeyPoint> keypoints;
detector.detect(src, keypoints);
//cout << keypoints.size() << " of keypoints are found" << endl;
cv::FileStorage fs(firstInsectXML, FileStorage::WRITE);
detector.write(fs);
fs.release();
SiftFeatureDetector detector2(400);
vector<KeyPoint> keypoints2;
detector.detect(src2, keypoints2);
cv::FileStorage fs2(secondInsectXML, FileStorage::WRITE);
detector.write(fs2);
fs2.release();
//Compute the SIFT feature descriptors for the keypoints
//Multiple features can be extracted from a single keypoint, so the result is a
//matrix where row "i" is the list of features for keypoint "i"
SiftDescriptorExtractor extractor;
Mat descriptors;
extractor.compute(src, keypoints, descriptors);
SiftDescriptorExtractor extractor2;
Mat descriptors2;
extractor.compute(src2, keypoints2, descriptors2);
//Print some statistics on the matrices returned
//Size size = descriptors.size();
//cout<<"Query descriptors height: "<<size.height<< " width: "<<size.width<< " area: "<<size.area() << " non-zero: "<<countNonZero(descriptors)<<endl;
//saveKeypoints(keypoints, detector);
Mat output;
drawKeypoints(src, keypoints, output, Scalar(0, 0, 255), DrawMatchesFlags::DEFAULT);
imwrite(firstInsectPicture, output);
Mat output2;
drawKeypoints(src2, keypoints2, output2, Scalar(0, 0, 255), DrawMatchesFlags::DEFAULT);
imwrite(secondInsectPicture, output2);
//Corresponded points
BFMatcher matcher(NORM_L2);
vector<DMatch> matches;
matcher.match(descriptors, descriptors2, matches);
cout<< "Number of matches: "<<matches.size()<<endl;
Mat img_matches;
drawMatches(src, keypoints, src2, keypoints2, matches, img_matches);
imwrite(resultPicture, img_matches);
system("PAUSE");
waitKey(10000);
return 0;
}
Question 1: Why all of the features are matching in these two images? Question 2: How can I store(i.e. XML file) features of an image in a way that the features can be stored in order to train them in a classification tree (i.e. random tree)?
EDIT:
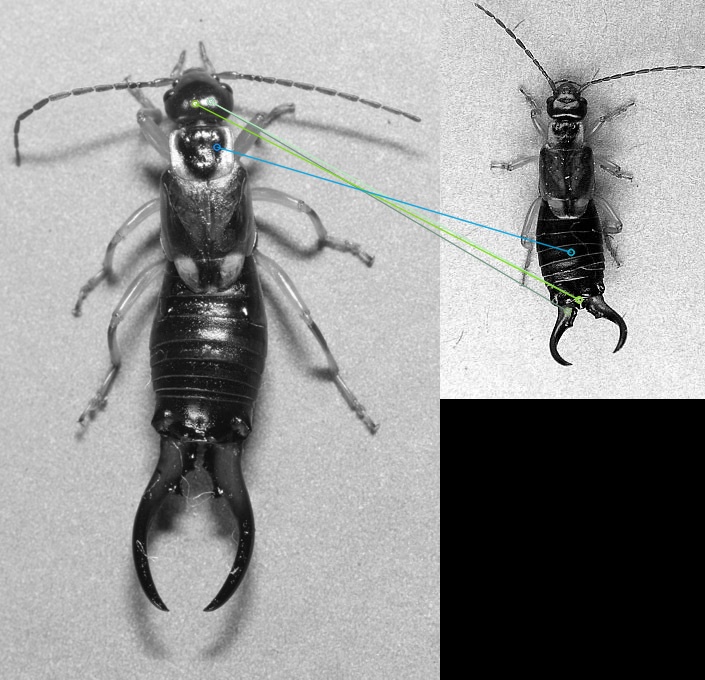
Working on grayscale images does not give different results. Matching 2 same kind of insects and matching 2 different kind of insects produces same number of matches.