In real_time_pose_estimation( samples given in opencv 3.1.0) no errors but fails to detect the object
Registered the 3D textured model of the object to be detected in a .yml file .keyPoints.png
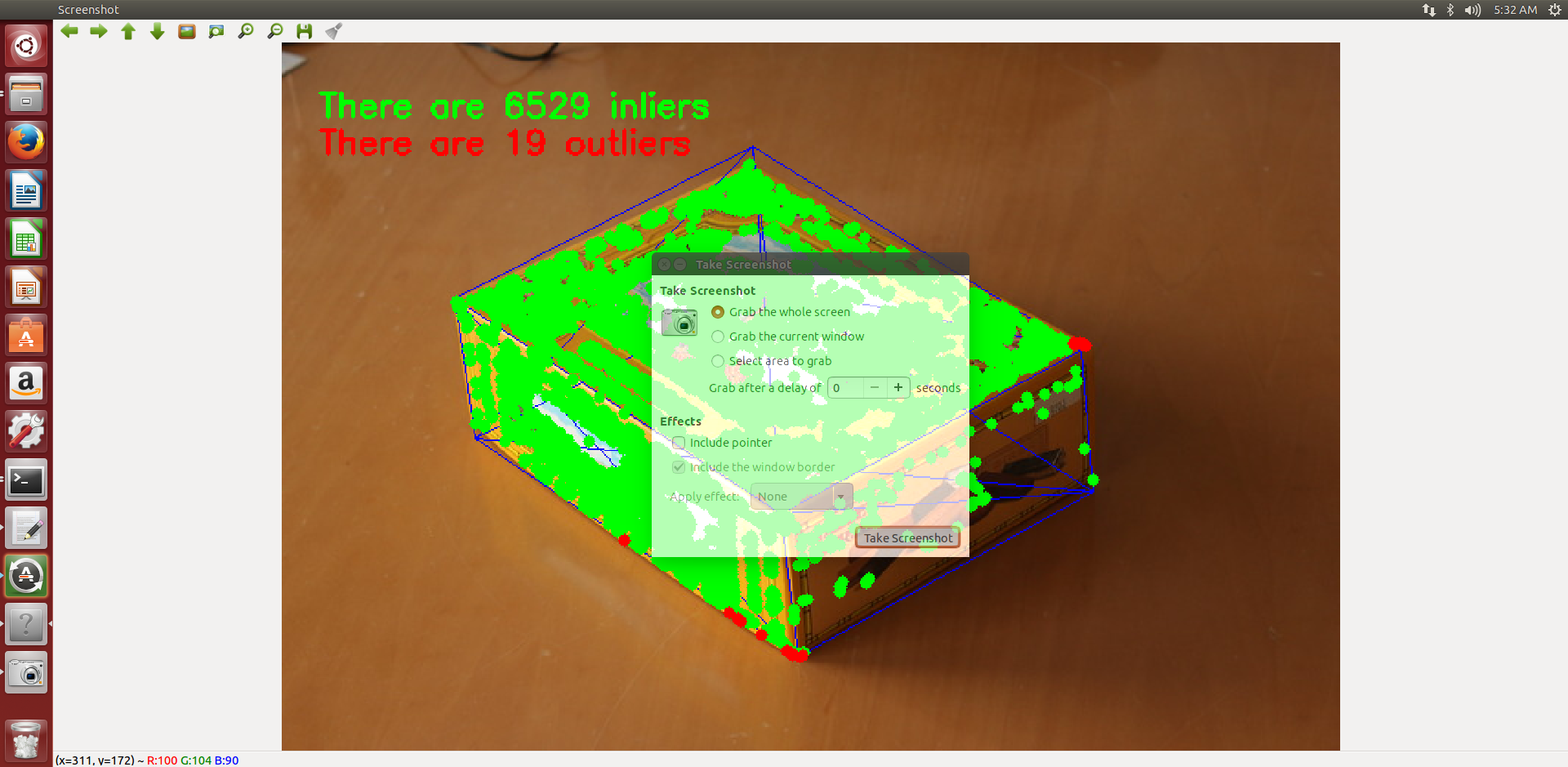
Storing the 3D information .registration.png
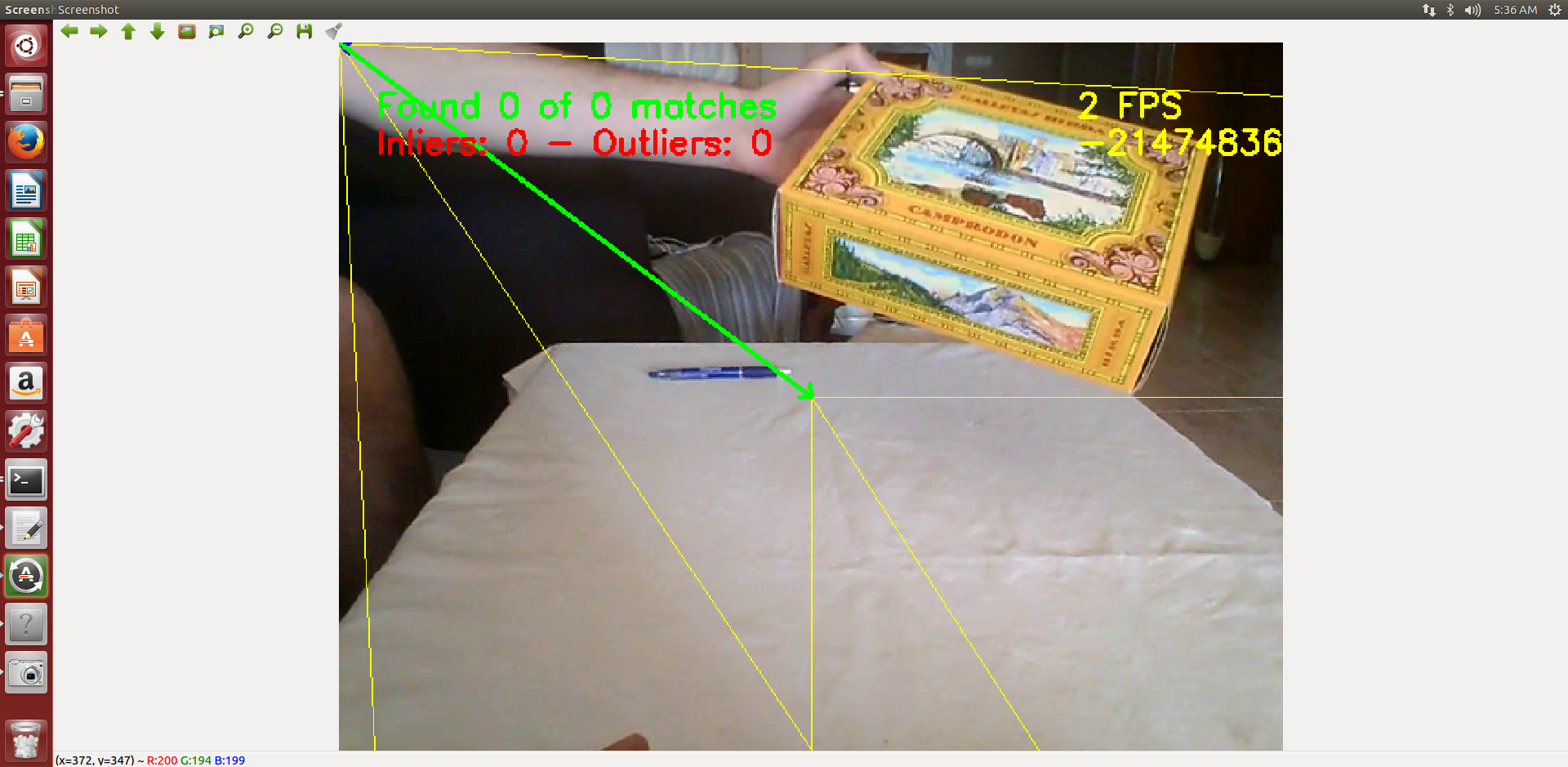
In detection video plays but fails to detect the object.detection.png
As am not good in understanding algorithms I need to know where am going wrong.
{kind=link}
{kind=link}
{kind=link}
In liners what i got in registration is more than 6000 . how to reduce the in-liner value below 1000 to get more accuracy.?