focal length and calibration

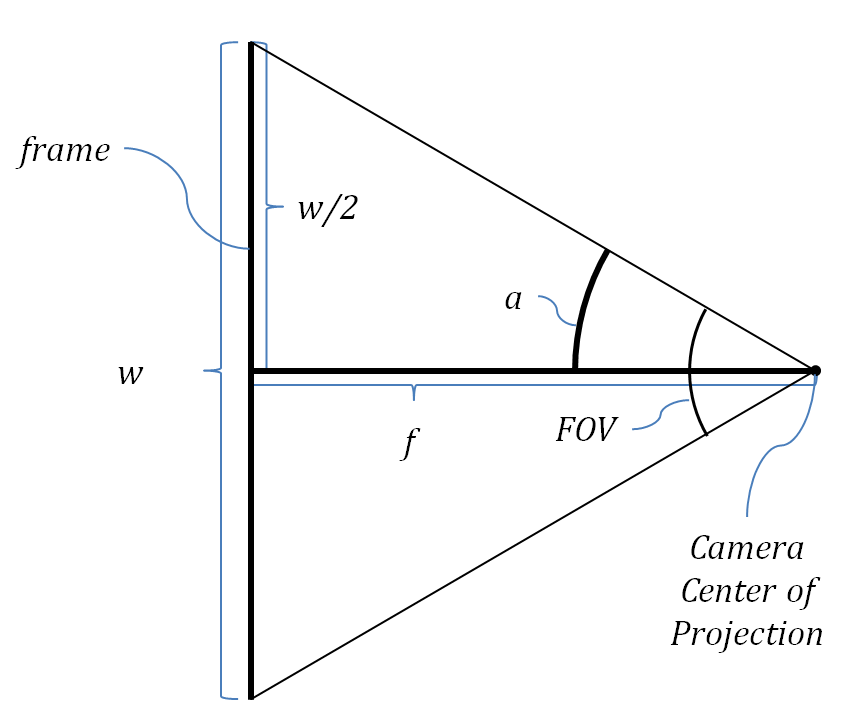
Is there a mapping of camera FOV and resolution to focal length as accepted by solvePnP or especially POSIT?
End-users can't be expected to do chessboard-calibration. :(
Since there are camera specs available online, it would've been much easier if such mapping existed.
What are the variables for focal length, anyway? I always guessed, or used a retractable ruler on POSIT, my face, and several (dozen) iterations of launching the POSIT-using code with different focal lengths. This is far from robust, though.
I'll be grateful from the bottom of my heart to anyone who provides an equation that works!!!
-sh
add a comment