This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
In the pin-hole camera model, focal length is the distance on the image-plane from the focal point of the camera. However, the units it is given in may differ from system to system.
Film cameras and lens, usually denote is in mm. The effective (pin-hole) FOV is measured relative to e.g. 35mm, the width of the film.
In this case, if the frame width is 35mm, and the distance is, say 30mm, then simple trigonometry gives you:
For digital cameras you can substitute the sensor width for 35mm.
In vision systems, the focal length is often calculated in pixels, so that the width is taken as the image width is pixels. If you know your sensor size in mm, you can easily convert between the two.
Obviously, if you know your FOV, you can reverse this simple calculation to get f in which ever units you know your width.
| | 2 | No.2 Revision |
In the pin-hole camera model, focal length is the distance on of the image-plane from the focal point of the camera. However, the units it is given in may differ from system to system.
Film cameras and lens, usually denote is f in mm. The effective (pin-hole) FOV is measured relative to the width of the film, e.g. 35mm, the width of the film. 35mm.
In this case, if the frame width is 35mm, and the distance is, say 30mm, then simple trigonometry gives you:
For digital cameras you can substitute the sensor width for 35mm.the film width (35mm).
In vision systems, the focal length is often calculated in pixels, so that the width is taken as the image width is in pixels. If you know your sensor size in mm, you can easily convert between the two.
Obviously, if you know your FOV, you can reverse this simple calculation to get f in which ever units you know your width.
| | 3 | No.3 Revision |
In the pin-hole camera model, focal length is the distance of the image-plane from the focal point of the camera. However, the units it is given in may differ from system to system.
Film cameras and lens, usually denote f in mm. The effective (pin-hole) FOV is measured relative to the width of the film, e.g. 35mm.
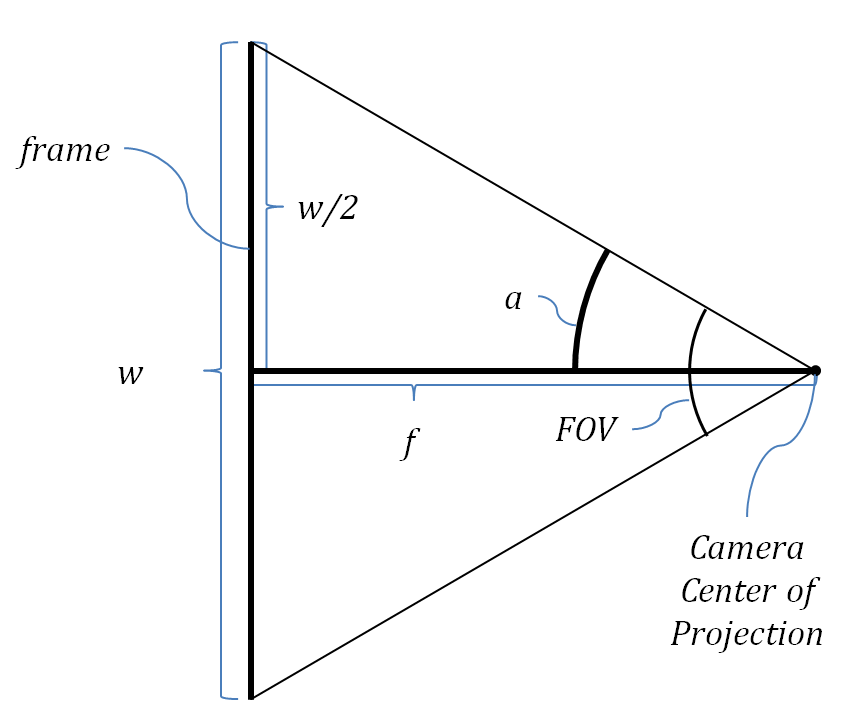
In this case, if the frame width is 35mm, and the distance is, say 30mm, then simple trigonometry gives you:
For digital cameras you can substitute the sensor width for the film width (35mm).
In vision systems, the focal length is often calculated in pixels, so that the width is taken as the image width in pixels. If you know your sensor size in mm, you can easily convert between the two.
Obviously, if you know your FOV, you can reverse this simple calculation to get f in which ever units you know your width.
