This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Hi AgentCain,
I don't know if there is a function that implements this for you, but going back from 3D PointCloud to disparity is relatively easy knowing the reprojection matrix Q (one of the arguments to the function reprojectImageTo3D).
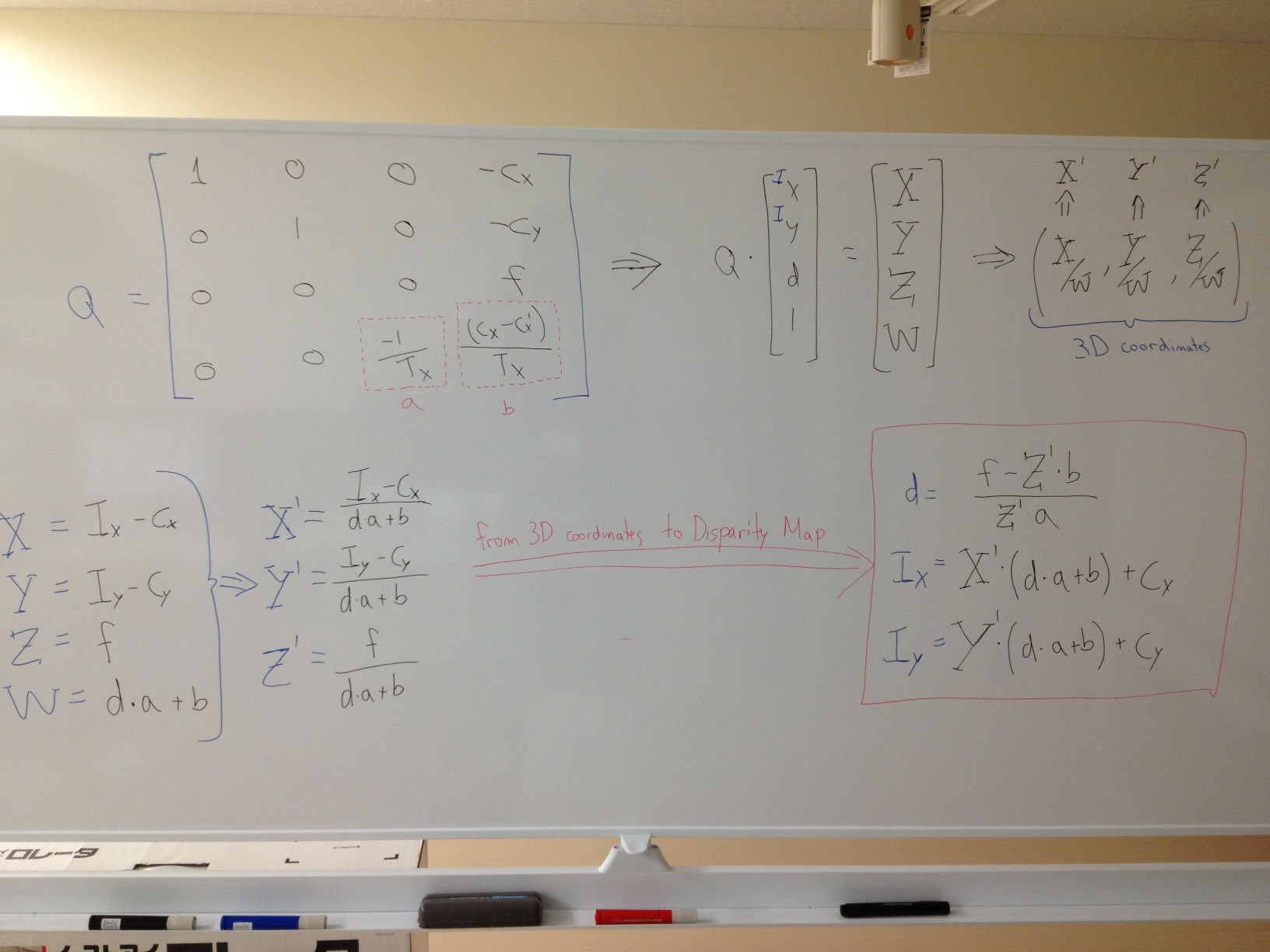
The matrix Q has the following structure:
Q =| 1 0 0 -Cx |
| 0 1 0 -Cy |
| 0 0 0 f |
| 0 0 a b |
So assuming that your 3D point has the coordinates (X', Y', Z') the disparity (d) and its position on the disparity image (Ix and Iy) can be calculated as follow:
d = (f - Z' * b ) / ( Z' * a)
Ix = X' * ( d * a + b ) + Cx
Iy = Y' * ( d * a + b ) + Cy
I attach a picture of the math, just in case you want to know the details. I hope this helps.
| | 2 | No.2 Revision |
Hi AgentCain,
I don't know if there is a function that implements this for you, but going back from 3D PointCloud to disparity is relatively easy knowing the reprojection matrix Q (one of the arguments to the function reprojectImageTo3D).
The matrix Q has the following structure:
Q =| 1 0 0 -Cx |
| 0 1 0 -Cy |
| 0 0 0 f |
| 0 0 a b |
So assuming that your 3D point has the coordinates (X', Y', Z') Z'), the disparity (d) and its position on the disparity image (Ix and Iy) can be calculated as follow:
d = (f - Z' * b ) / ( Z' * a)
Ix = X' * ( d * a + b ) + Cx
Iy = Y' * ( d * a + b ) + Cy
I attach a picture of the math, just in case you want to know the details. I hope this helps.
{kind=link}