This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
It really easy: the chessboard is a planar surface, a plane in the 3d space can be defined using 2 of the dimensions, for instance XY for simplicity. All the point of the chessboard lie in this plane (we already said that is a planar surface, right?) so you can say that all the point on the chessboard have Z=0 because 2 coordinate are sufficient to determine a point in the chessboard. This is not the coordinate related to the camera reference frame, neither the coordinate of a 3d world point, this assumption means simply that the chessboard is planar.
For instance, this image let you understand very easily
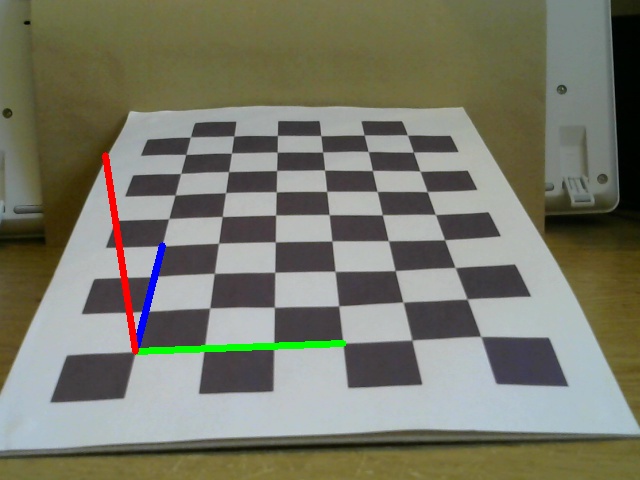
blue and green define the XY plane, the red is the Z coordinate. I give you a hint: a calibration pattern like this is not good because you can clearly see that is not that planar at all. For a very good calibration result I suggest you to print your calibration chessboard in a rigid surface, or at least try to glue or stick it in a real planar surface.
| | 2 | No.2 Revision |
It really easy: the chessboard is a planar surface, a plane in the 3d space can be defined using 2 of the dimensions, for instance XY for simplicity. All the point of the chessboard lie in this plane (we already said that is a planar surface, right?) so you can say that all the point on the chessboard have Z=0 because 2 coordinate are sufficient to determine a point in the chessboard. This is not the coordinate related to the camera reference frame, neither the coordinate of a 3d world point, this assumption means simply that the chessboard is planar.
For instance, this image let you understand very easily
blue and green define the XY plane, the red is the Z coordinate. I give you a hint: a calibration pattern like this is not good because you can clearly see that is not that planar at all. For a very good calibration result I suggest you to print your calibration chessboard in a rigid surface, or at least try to glue or stick it in a real planar surface.
| | 3 | No.3 Revision |
It really easy: the chessboard is a planar surface, a plane in the 3d space can be defined using 2 of the dimensions, for instance XY for simplicity. All the point of the chessboard lie in this plane (we already said that is a planar surface, right?) so you can say that all the point on the chessboard have Z=0 because 2 coordinate are sufficient to determine a point in the chessboard. This is not the coordinate of a 3d world point, this assumption means simply that the chessboard is planar.
For instance, this image let you understand very easily
blue and green define the XY plane, the red is the Z coordinate. I give you a hint: a calibration pattern like this is not good because you can clearly see that is not that planar at all. For a very good calibration result I suggest you to print your calibration chessboard in a rigid surface, or at least try to glue or stick it in a real planar surface.
All the right for the image are of the author, If there is any problem regarding it I can remove the image.
