This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
You should add a figure of your setup to better let other people understand what you want to do. If I have understood correctly, you are doing the following:
img_pts)objectPoints)solvePnPThis looks not correct for hand-eye calibration:
solvePnP should be used to compute the transformation between the camera frame and the object frameobjectPoints are expressed in some reference frameimg_pts, the camera has movedThis topic is well covered in the literature:
Normally the setup should be:
T_robot_camera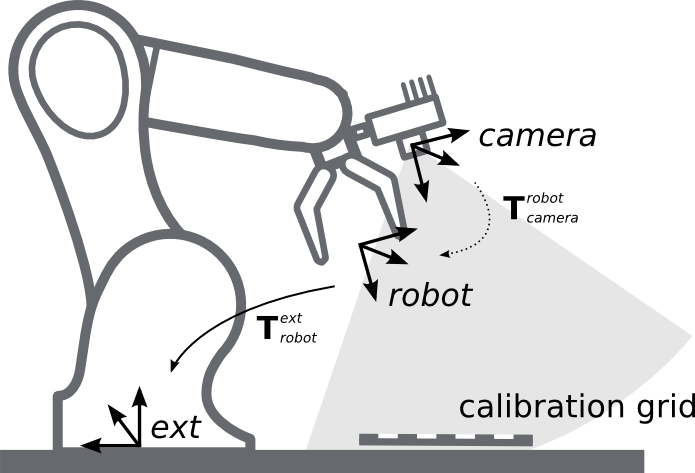
T_ext_camera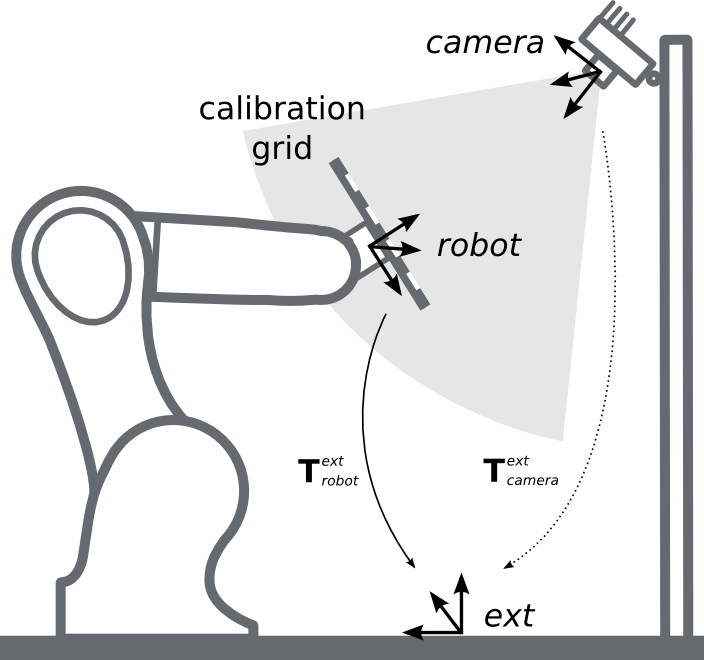
In the first case, the calibration procedure is:
findChessboardCorners() + solvePnP())Then, you can estimate the transformation between the end-effector frame and the camera frame using a standard hand-eye calibration method (e.g. Tsai method).
You should be able to find some code that implements the Tsai method or some similar methods, for instance maybe this one: ROS + CamOdoCal Hand Eye Calibration.
My advice is to use ViSP to do the Tsai calibration since I have already used this library: