This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Please refer to the following references for more information:
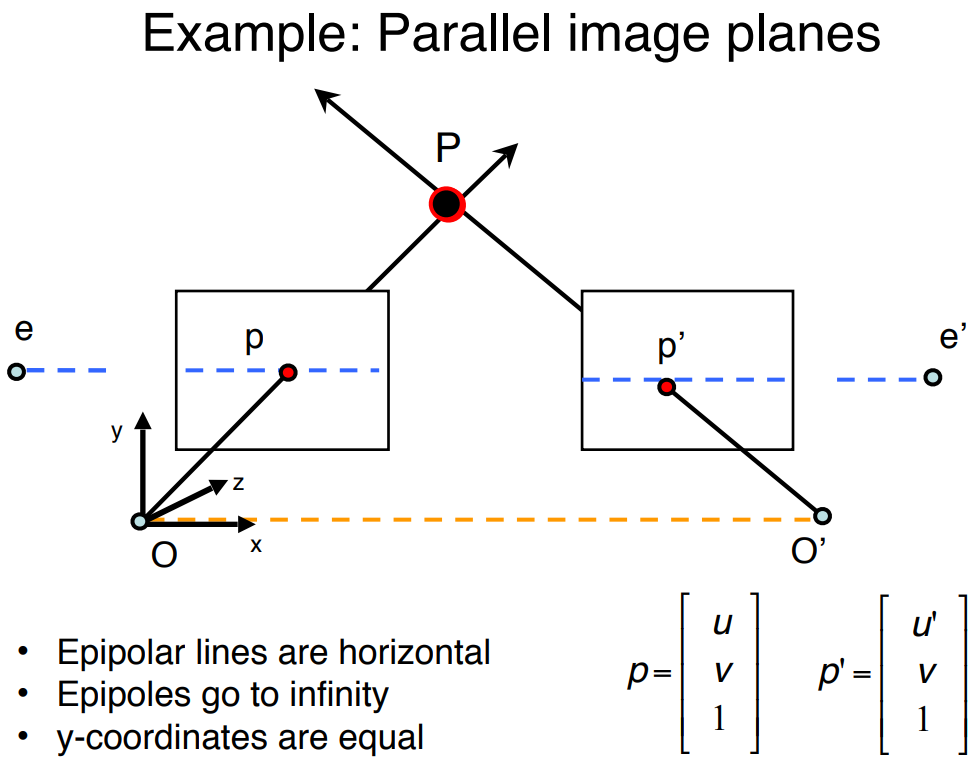
Rectification will make the left and right images fronto-parallel:
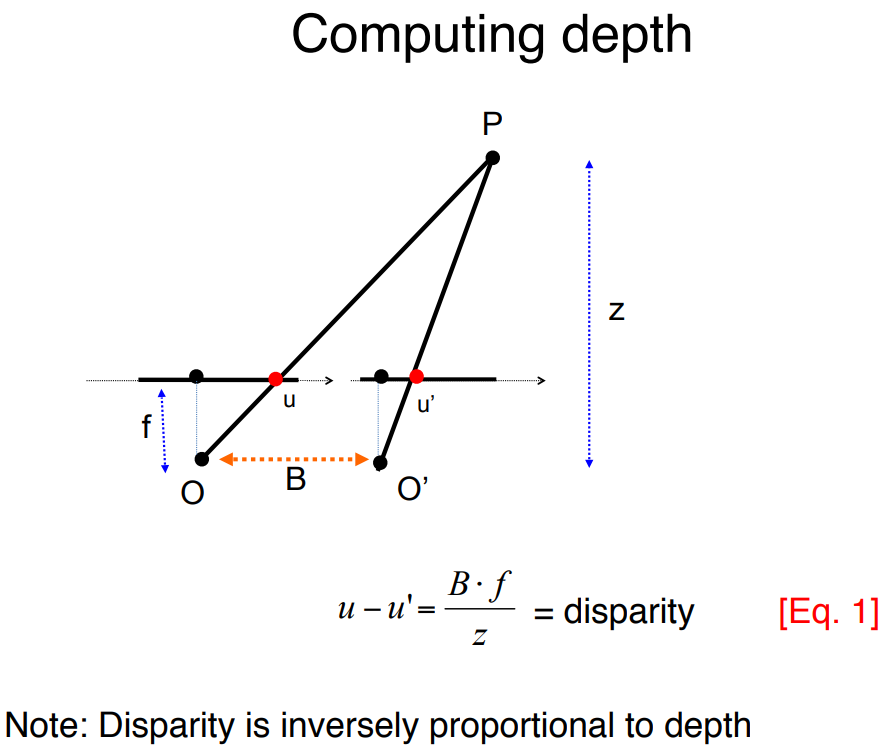
Relation between depth of a triangulated point and disparity is the following:
From equation:
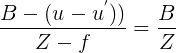
you will get [Eq. 1].
In OpenCV notation, depth of a triangulated point is calculated with:

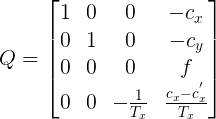
The 4x4 disparity-to-depth mapping matrix Q is:
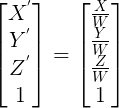
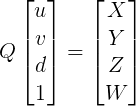
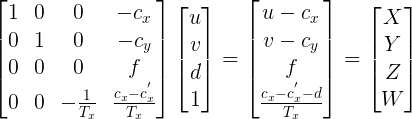
The relation between 3D point in homogeneous coordinate and disparity is:
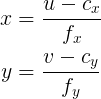
Remember that 2D image point expressed in pixel can be converted to meter in the normalized camera frame (Z=1) with:
If left principal point c_x and right principal point c'_x are equals, we get the original equation to compute the depth:
Minus sign should come from if you compute d = (u - u') or d = (u' - u).
As everything is in homogeneous coordinate, 3D point is retrieved with: