This forum is disabled, please visit https://forum.opencv.org
| 2016-08-29 14:21:51 -0600 | commented question | Stereo camera calibration gives bad rms error Thank you berak, for your interest. As i said above, i just used sample code. I only changed code to enter my image locations. Therefore i did not include these codes. And thank you too FooBar. Code first calculates intrinsic and other values. I got a file which contains these values from code. |
| 2016-08-29 12:24:44 -0600 | received badge | ● Editor (source) |
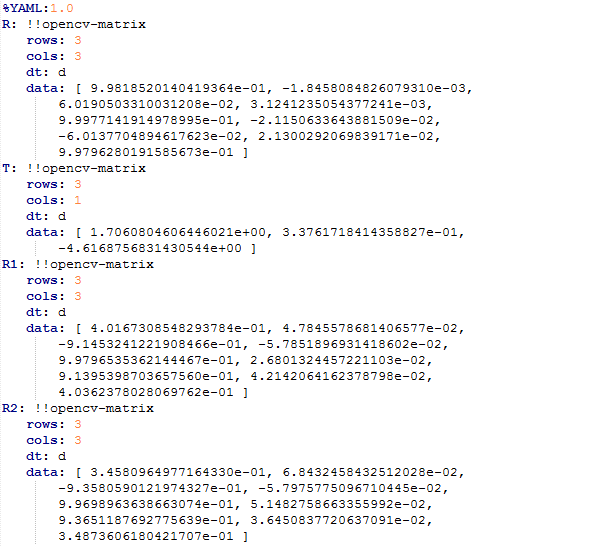
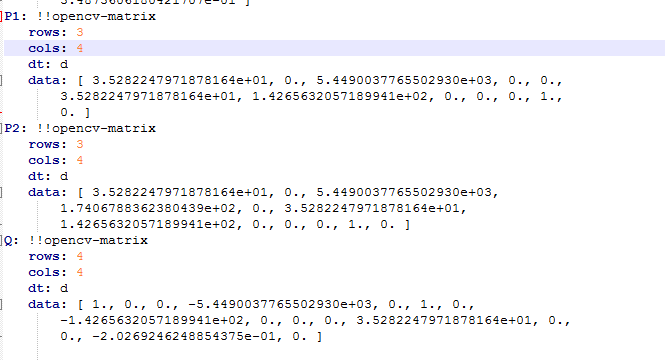
| 2016-08-29 12:21:07 -0600 | asked a question | Stereo camera calibration gives bad rms error I am trying to calibrate my homemade stereo camera. I used sample code provided by OpenCV (stereo_calib.cpp). I use 30 pairs of chessboard images. Code can find inner corners. At the end i have RMS value of 21 and rectified image is just a black image. How can i improve RMS value??? Here is my intrinsic.yml file:
|