|
2019-08-16 09:25:02 -0600
| received badge | ● Notable Question
(source)
|
|
2018-04-10 09:48:50 -0600
| received badge | ● Popular Question
(source)
|
|
2016-08-19 15:55:00 -0600
| commented answer | Display a rectified video (stereo camera) From here you can write the video to a file and then upload it. |
|
2016-08-19 15:53:58 -0600
| answered a question | Display a rectified video (stereo camera) The function Undistort can be used to display the rectification. Try something like this: # Left camera
dst1=cv2.undistort(vidL,cameraMatrixLeft,distCoeffsLeft) # apply calibration to left camera
cv2.namedWindow('Left Calibrated',cv2.WINDOW_NORMAL) # resizeable window
cv2.imshow('Left Calibrated',dst1) # display left image
# Right camera
dst2=cv2.undistort(vidR,cameraMatrixRight,distCoeffsRight) # apply calibration to right camera
cv2.namedWindow('Right Calibrated',cv2.WINDOW_NORMAL) # resizeable window
cv2.imshow('Right Calibrated',dst2) # display right image
Cheers,
Jordan |
|
2016-08-19 15:26:23 -0600
| asked a question | What is the cv2.stereoCalibrate: "imageSize" variable format? [Python] What is the cv2.stereoCalibrate: "imageSize" variable format? I've tried numpy arrays, defining the variable plainly, pixel count (720 x 1280 x 3), etc. but I'm still getting the below error. I can't seem to find any documentation on it. Please help! Snippet of code: # Stereo calibration
imageSize = (720,1280)
retval_stereo,cameraMatrixLeft,distCoeffsLeft,cameraMatrixRight,distCoeffsRight,R,T,E,F=cv2.stereoCalibrate(
objPoints,
imgPoints1,
imgPoints2,
cameraMatrix1,
distCoeffs1,
cameraMatrix2,
distCoeffs2,
imageSize
)
Error message: Traceback (most recent call last):
File "CalibrationOpenCV_TEST.py", line 78, in <module>
imageSize
SystemError: new style getargs format but argument is not a tuple
|
|
2016-08-19 09:14:25 -0600
| received badge | ● Enthusiast
|
|
2016-08-15 14:56:43 -0600
| received badge | ● Editor
(source)
|
|
2016-08-15 13:47:20 -0600
| asked a question | Stereo Camera Calibration/Rectification with Zed Camera (python) Goal:
I want to calibrate and rectify my Zed camera. The input video feed leads to some complications. However, this method produces fewer headaches than buying a new computer which contains an NVIDIA GPU just for the sake of using the proprietary software (which may or may not allow of the end goal). For now, all I want to do is calibrate my camera so I can start estimating sizes and distances of (first known, then unknown) objects. For reference, this is what the Zed camera's video looks like:
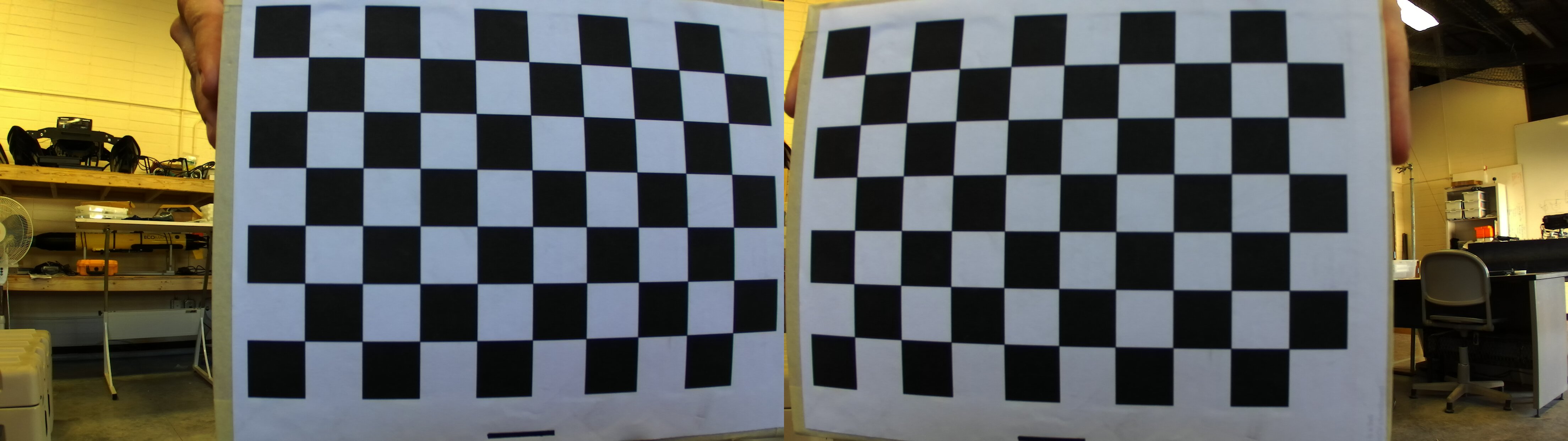 FIG. 1 - Raw image from Zed Camera. I figured out a quick-and-dirty method of splitting the video feed. Generally: cap = cv2.VideoCapture(1) # video sourced from Zed camera
while(True):
# Capture frame-by-frame
ret, frame = cap.read()
# partition video
vidL = frame[0:1080, 0:1280] # left camera
vidR = frame[0:1080, 1281:2560] # right camera
The resulting images look like this:
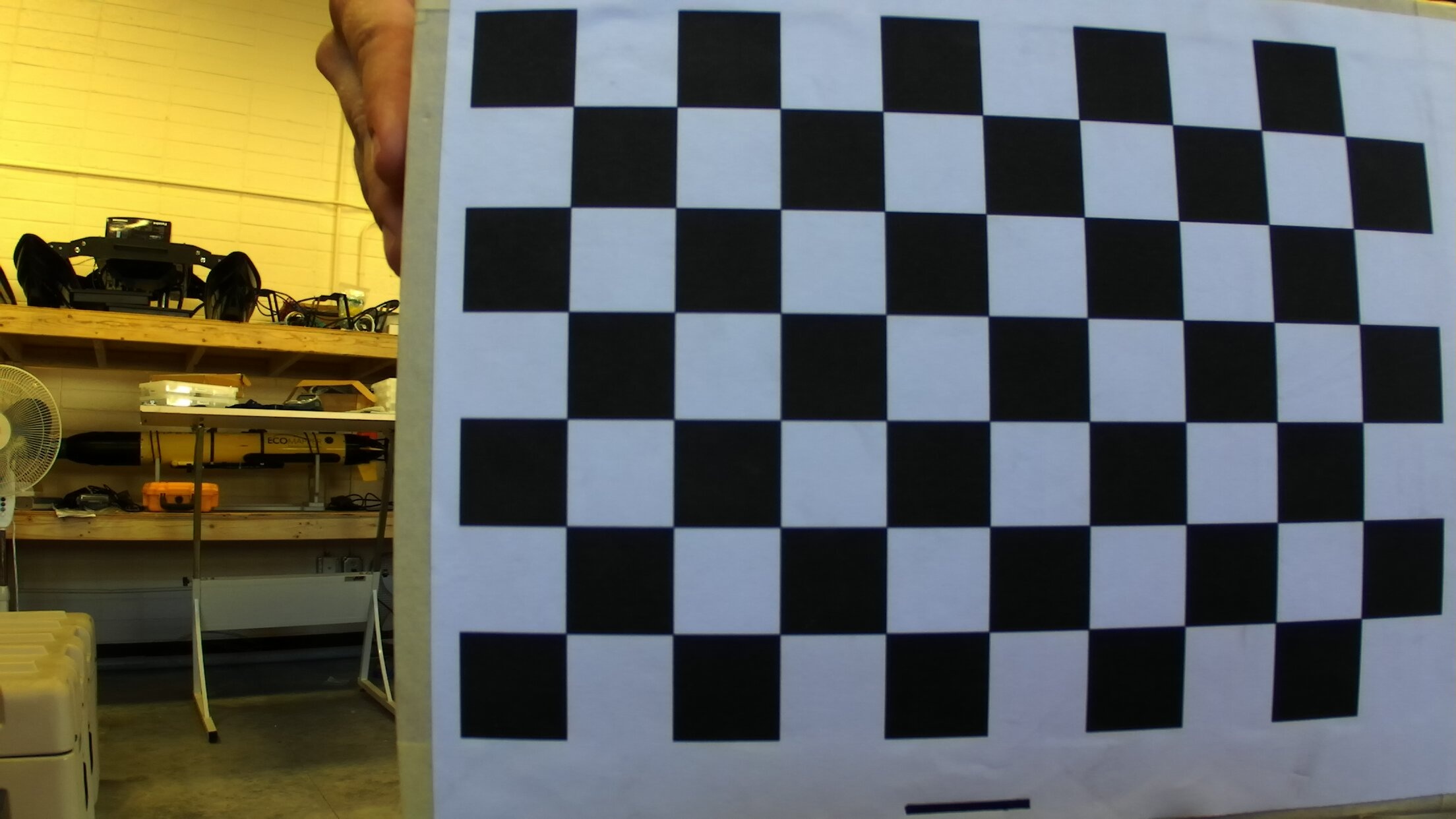 FIG 2. - Left image from Zed camera. 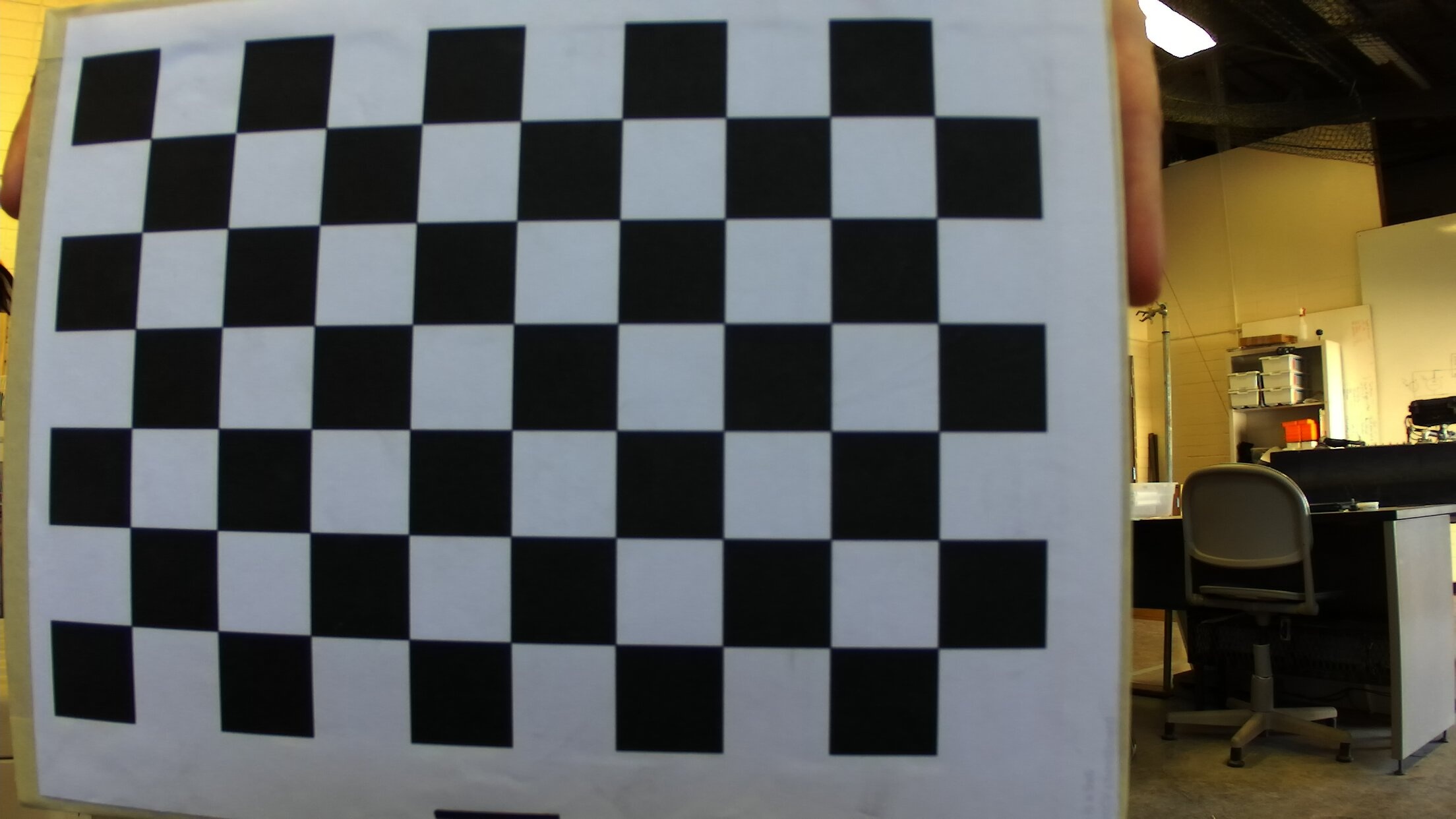
FIG 3. - Right image from Zed Camera. My code is adapted from this source . It runs a calibration and rectification of a camera with live video feed. I tested it before I made any changes and it worked, albeit with some odd results. (It partially rectified a section of the image.) #!usr/bin/python
import cv, cv2, time, sys
import numpy as np
#n_boards=0 #no of boards
#board_w=int(sys.argv[1]) # number of horizontal corners
#board_h=int(sys.argv[2]) # number of vertical corners
#n_boards=int(sys.argv[3])
#board_n=board_w*board_h # no of total corners
#board_sz=(board_w,board_h) #size of board
n_boards=0 #no of boards
board_w=(9) # number of horizontal corners
board_h=(6) # number of vertical corners
n_boards=1
board_n=board_w*board_h # no of total corners
board_sz=(board_w,board_h) #size of board
# creation of memory storages
# Left
image_pointsL=cv.CreateMat(n_boards*board_n,2,cv.CV_32FC1)
object_pointsL=cv.CreateMat(n_boards*board_n,3,cv.CV_32FC1)
point_countsL=cv.CreateMat(n_boards,1,cv.CV_32SC1)
intrinsic_matrixL=cv.CreateMat(3,3,cv.CV_32FC1)
distortion_coefficient_L=cv.CreateMat(5,1,cv.CV_32FC1)
# Right
image_pointsR=cv.CreateMat(n_boards*board_n,2,cv.CV_32FC1)
object_pointsR=cv.CreateMat(n_boards*board_n,3,cv.CV_32FC1)
point_countsR=cv.CreateMat(n_boards,1,cv.CV_32SC1)
intrinsic_matrixR=cv.CreateMat(3,3,cv.CV_32FC1)
distortion_coefficient_R=cv.CreateMat(5,1,cv.CV_32FC1)
# capture frames of specified properties and modification of matrix values
i=0
y=0
z=0 # to print number of frames
successes=0
# Capture video from camera
capture = cv2.VideoCapture(1) # 1 references Zed camera, cange as necessary
# partition video
while(successes<n_boards):
found=0
ret, frame = capture.read()
capL = frame[0:1080, 0:1280] # left camera
capR = frame[0:1080, 1281:2560] # right camera
imageL = cv2.cv.iplimage(capL)
imageR = cv2.cv.iplimage(capR)
# Left
gray_imageL=cv.CreateImage(cv.GetSize(imageL),8,1)
cv.CvtColor(imageL,gray_imageL,cv.CV_BGR2GRAY)
# Right
gray_imageR=cv.CreateImage(cv.GetSize(imageR),8,1)
cv.CvtColor(imageR,gray_imageR,cv.CV_BGR2GRAY)
# Left
(foundL,cornersL)=cv.FindChessboardCorners(gray_imageL,board_sz,cv.CV_CALIB_CB_ADAPTIVE_THRESH| cv.CV_CALIB_CB_FILTER_QUADS)
cornersL=cv.FindCornerSubPix(gray_imageL,cornersL,(11,11),(-1,-1),(cv.CV_TERMCRIT_EPS ...
(more) |
|
2016-08-15 13:05:37 -0600
| received badge | ● Supporter
(source)
|
|
2016-08-15 13:05:36 -0600
| received badge | ● Scholar
(source)
|
|
2016-08-09 15:27:20 -0600
| commented answer | Bisect Video Feed - Zed Camera Comment (2/2)
It opened up a new window labeled Left with nothing shown (white background). The window doesn't respond. After a few seconds the OS takes over requiring the window to be forced to quit. When the print statement is un-commented the ret remains true until the script is killed. |
|
2016-08-09 15:23:23 -0600
| commented answer | Bisect Video Feed - Zed Camera Comment (1/2)
Is there any reason this shouldn't work? #!usr/bin/python
import cv2
import numpy as np
# script imports Zed camera feed and splits the two feeds into left and right frames
# Capture video on camera device 1
vid = cv2.VideoCapture(1)
while(True):
# Capture frame-by-frame
ret, img = vid.read() # please check if ret==True. only fools don't.
#print "Check if true: %d" % ret
imgLeft = img[1:1242, 1:2208]
imgRight = img[1:1242, 2208:4416]
# Display the resulting frame
# left
#cv2.namedWindow('Left', cv2.WINDOW_NORMAL)
#cv2.resizeWindow('Left', 1920, 1080)
cv2.imshow('Left', imgLeft)
# right
#cv2.namedWindow('Right', cv2.WINDOW_NORMAL)
#cv2.resizeWindow('Right', 1920, 1080)
cv2.imshow('Right', imgRight)
# End Process
cv2.waitKey(0)
cv2.destroyAllWindows()
|
|
2016-08-09 14:16:54 -0600
| commented answer | Bisect Video Feed - Zed Camera |
|
2016-08-09 14:16:40 -0600
| commented answer | Bisect Video Feed - Zed Camera I included the code you provided as follows:
#!usr/bin/python
import cv2
import numpy as np # Capture video on camera device 1
vid = cv2.VideoCapture(1)
while(True):
# Capture frame-by-frame
img, ret = vid.read() # please check if ret==True. only fools don't.
imgLeft = img[1:1080, 1:1920]
imgRight = img[1:1080, 1920:3840]
# Display the resulting frame
# left
cv2.namedWindow('Left', cv2.WINDOW_NORMAL)
cv2.resizeWindow('Left', 1920, 1080)
cv2.imshow('Left', imgLeft)
# right
cv2.namedWindow('Right', cv2.WINDOW_NORMAL)
cv2.resizeWindow('Right', 1920, 1080)
cv2.imshow('Right', imgRight)
Error Message:
imgLeft = img[1:1080, 1:1920]
TypeError: 'bool' object has no attribute '__getitem__' |
|
2016-08-09 13:55:37 -0600
| commented question | Bisect Video Feed - Zed Camera I will when I get the camera running. That was just an attempted quick fix. |
|
2016-08-09 13:48:03 -0600
| asked a question | Bisect Video Feed - Zed Camera Background:
I was given a Zed Camera with the task of using it as a stereo camera. StereoLabs provided a proprietary software which requires CUDA (NVIDIA hardware-dependent software package) to run. I found a few tutorials for making and calibrating a stereo camera (example). I need to reformat the Zed camera's video feed in order to use this method. Goal:
I'm trying to set up my zed camera as a stereo camera. The camera takes images which look like this: (see Fig. 1)
 and using the below script I separated the static image into two halves: (see Figs 2,3)
and using the below script I separated the static image into two halves: (see Figs 2,3)
  Script: #!usr/bin/python
import cv2
import numpy as np
# Import image
img = cv2.imread('TestPicture3.jpg')
# split image (indexing)
image_left = img[1:1080, 1:1920]
image_right = img[1:1080, 1920:3840]
# Display left and right images
cv2.namedWindow('Left', cv2.WINDOW_NORMAL)
cv2.resizeWindow('Left', 1920, 1080)
cv2.imshow('Left', image_left)
cv2.namedWindow('Right', cv2.WINDOW_NORMAL)
cv2.resizeWindow('Right', 1920, 1080)
cv2.imshow('Right', image_right)
cv2.waitKey(0)
# export images
cv2.imwrite('TestPic_left.jpg', image_left)
cv2.imwrite('TestPic_right.jpg', image_right)
cv2.destroyAllWindows()
I want to bisect the video feed in order to capture left and right video. Below is the script I've written to attempt the bifurcation, but it hasn't worked. What should I do? #!usr/bin/python
import cv2
import numpy as np
# script imports Zed camera feed and splits the two feeds into left and right frames
# Capture video on camera device 1
vid = cv2.VideoCapture(1)
# Split video feed on left side
imgLeft = vid.read[1:1080, 1:1920]
# Split video feed on right side
imgRight = vid.read[1:1080, 1920:3840]
while(True):
# Capture frame-by-frame
ret, frame = vid.read()
# Display the resulting frame
# left
cv2.namedWindow('Left', cv2.WINDOW_NORMAL)
cv2.resizeWindow('Left', 2208, 1242)
cv2.imshow('Left', imgLeft)
# right
cv2.namedWindow('Right', cv2.WINDOW_NORMAL)
cv2.resizeWindow('Right', 2208, 1242)
cv2.imshow('Right', imgRight)
# End Process
cv2.waitKey(0)
cv2.destroyAllWindows()
The resulting error is: Traceback (most recent call last):
File "Split_VideoCapture_Test.py", line 11, in <module>
imgLeft = vid.read[1:1080, 1:1920]
TypeError: 'builtin_function_or_method' object has no attribute '__getitem__'
Thank in advance for the assistance. Cheers,
Jordan |