This forum is disabled, please visit https://forum.opencv.org
| 2019-07-16 05:51:25 -0600 | received badge | ● Enthusiast |
| 2019-07-11 04:08:03 -0600 | commented answer | ArUco orientation using the function aruco.estimatePoseSingleMarkers() Yes your right, my bad, I don't need this transformation. But I'm still struggling with the orientation of the aruco... |
| 2019-07-10 04:41:29 -0600 | received badge | ● Supporter (source) |
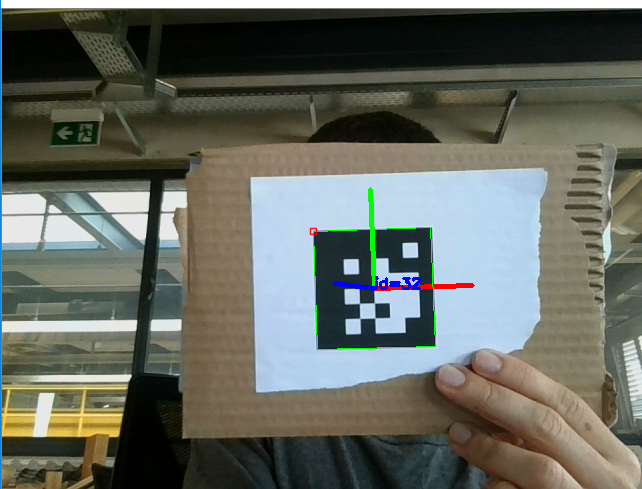
| 2019-07-10 04:41:27 -0600 | marked best answer | ArUco orientation using the function aruco.estimatePoseSingleMarkers() Hi everyone! I'm trying to program a python app that determine the position and orientation of an aruco marker. I calibrated the camera and everything and I used aruco.estimatePoseSingleMarkers that returns the translation and rotation vectors. The translation vector works fine but I don't understand how the rotation vector works. I took some picture to illustrate my problem with the "roll rotation": Here the rotation vector is approximately [in degree]: [180 0 0]
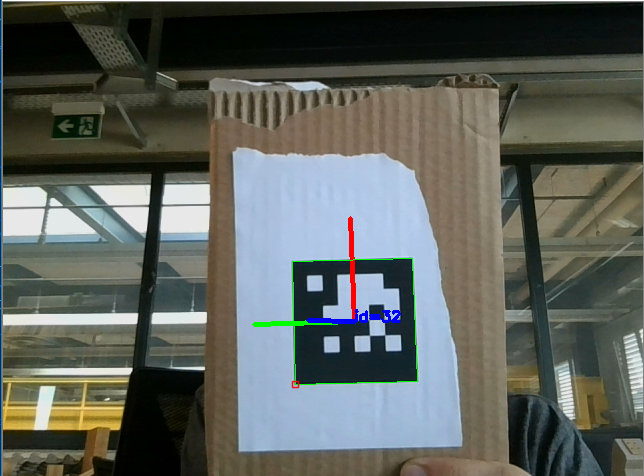
Here the rotation vector is approximately [in degree]: [123 -126 0]
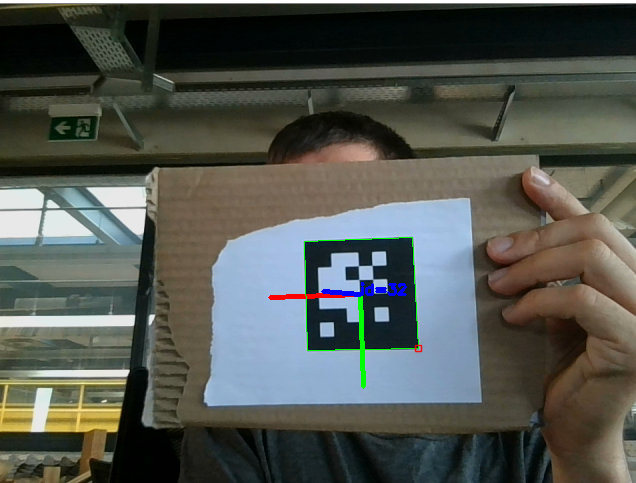
And here the rotation vector is approximately [in degree]: [0 -180 0]
And I don't see the logic in these angles. I've tried the other two rotations (pitch and yaw) and there appear also "random". So if you have an explication I would be very happy :) |
| 2019-07-10 04:41:27 -0600 | received badge | ● Scholar (source) |
| 2019-07-10 04:41:15 -0600 | commented answer | ArUco orientation using the function aruco.estimatePoseSingleMarkers() Thanks a lot for you answer, now it's a lot clearer! :) I was struggling to find information about computer vision. Yeah |
| 2019-07-09 10:40:56 -0600 | commented question | ArUco orientation using the function aruco.estimatePoseSingleMarkers() Yes but I rounded and put them in degree to have a better idea of there meaning |
| 2019-07-09 10:29:51 -0600 | asked a question | ArUco orientation using the function aruco.estimatePoseSingleMarkers() ArUco orientation using the function aruco.estimatePoseSingleMarkers() Hi everyone! I'm trying to program a python app |