This forum is disabled, please visit https://forum.opencv.org
| 2016-04-15 16:30:41 -0600 | commented question | cv::exeption ????????? ok thank's |
| 2016-04-15 14:29:08 -0600 | commented question | cv::exeption ????????? sorry for this late |
| 2016-04-14 13:49:33 -0600 | received badge | ● Editor (source) |
| 2016-04-14 13:30:22 -0600 | commented question | cv::exeption ????????? ok i will edit my question |
| 2016-04-14 13:29:26 -0600 | commented question | cv::exeption ????????? yes ok i am sorry |
| 2016-04-14 13:28:07 -0600 | commented question | cv::exeption ????????? it is very lisibal to copy the code in visual studio or any envirement and i am sorry because i didn't find a way to poste my code thank you for helping |
| 2016-04-14 13:15:19 -0600 | commented question | cv::exeption ????????? yes it is very long but i will show it for you |
| 2016-04-13 16:09:00 -0600 | asked a question | cv::exeption ????????? Hi please help me to solve this problem in open cv 3.1.0
i had implemented a gaborEnhancement filter and when i call this function it generate this exeption
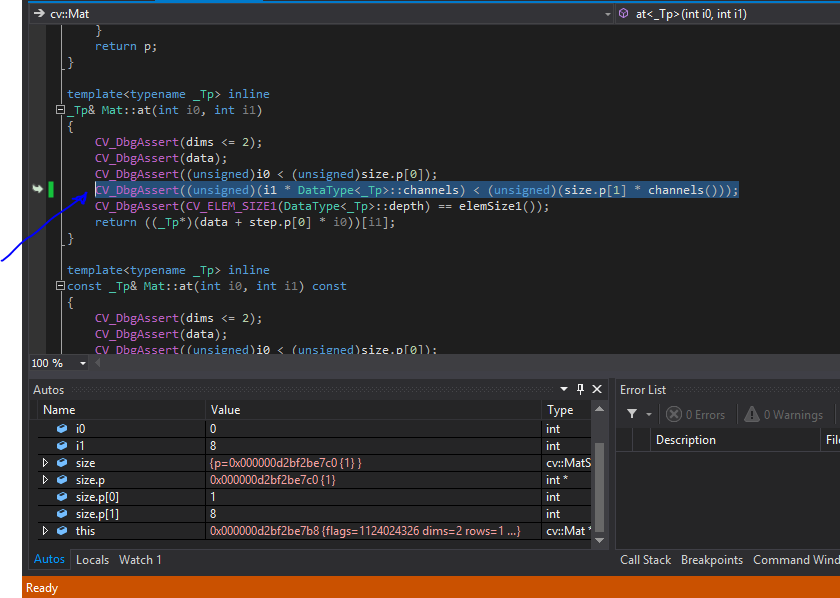
Unhandled exception at 0x00007FFF9B925BF8 in test.exe: Microsoft C++ exception: cv::Exception at memory location 0x000000D2BF2BDD20.
and get me here
--> CV_DbgAssert((unsigned)(i1 * DataType<_Tp>::channels) < (unsigned)(size.p[1] * channels())); and when i make this in mat.inl.hpp as a commentaire like that: it go normal and no error produce here is the code in the main * |
| 2016-04-12 00:51:09 -0600 | asked a question | createLinearFilter is not member of cv hi; please i am working in project of fingerprint recognation and this code in c++ generate this error : createLinearFilter is not member of cv the instruction of code : cv::Ptr <cv::filterengine> fe = cv::createLinearFilter(CV_32FC1, CV_32FC1, gaussKernel, cv::Point(0, 0), 0, cv::BORDER_CONSTANT, cv::BORDER_CONSTANT, cv::Scalar(0)); fe->apply(freqMat, frequencyImage); by now me i am with opencv 3.0.1 i know that FilterEngine is not member but createLinearFilter i don't know so please help to write these instructions of code using opencv 3.0.1 Thank you in first |