This forum is disabled, please visit https://forum.opencv.org
| 2019-03-08 04:56:58 -0600 | received badge | ● Editor (source) |
| 2019-03-08 04:56:58 -0600 | edited question | Detect rust using color segmentation Detect rust using color segmentation Hi, I wanted to detect rust inside a pipe by creating suitable boundary condition. |
| 2019-03-08 04:56:21 -0600 | asked a question | Detect rust using color segmentation Detect rust using color segmentation Hi, I wanted to detect rust inside a pipe by creating suitable boundary condition. |
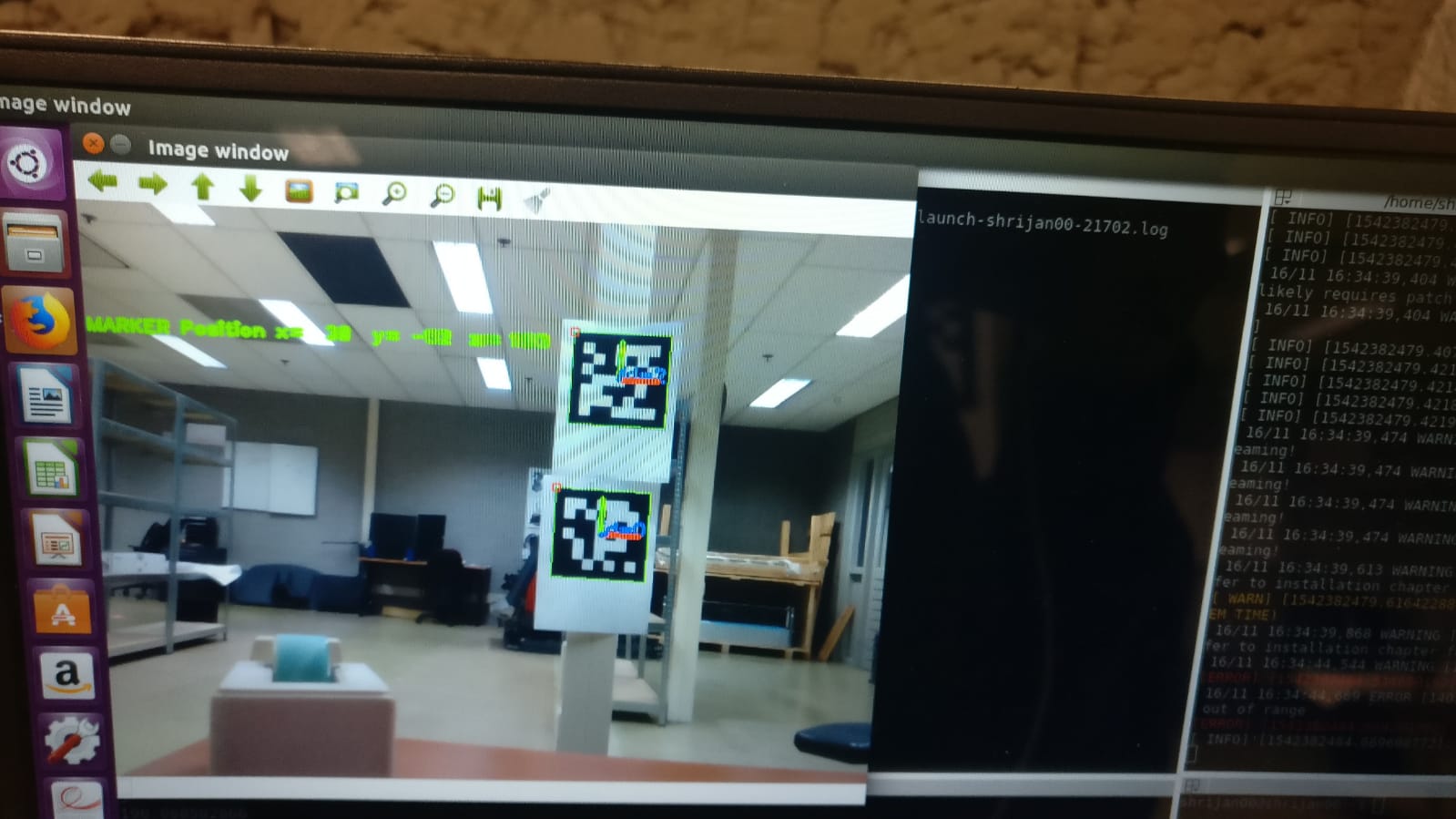
| 2018-11-17 04:17:29 -0600 | marked best answer | display pose next to the the detetcted ArUco marker Hi, I'm able to get pose of all the detected markers but i'm not able to display the pose of each marker respectively on the image.
So, anybody knows how to get the respective (x,y) position of the detected markers and then use cv2.putText? |
| 2018-11-17 04:17:29 -0600 | received badge | ● Scholar (source) |
| 2018-11-17 04:07:16 -0600 | commented answer | display pose next to the the detetcted ArUco marker Ahh, it works. Just changed a bit while doing cv2.putText.Have to play with offset only now..Thanks alot. pt =np.array( |
| 2018-11-17 04:06:32 -0600 | commented answer | display pose next to the the detetcted ArUco marker Ahh, it works. Just changed a bit while doing cv2.putText. pt =np.array([[-12, -12, 0]], dtype=np.float) #for |
| 2018-11-17 03:24:23 -0600 | commented answer | display pose next to the the detetcted ArUco marker On printing the imgpts i get ('Image points', (array([[[ 363.90325111, 151.41181538]]]), array([[ 0.00000000e+00, |
| 2018-11-17 02:42:38 -0600 | asked a question | display pose next to the the detetcted ArUco marker display pose next to the the detetcted ArUco marker Hi, I'm able to get pose of all the detected markers but i'm not abl |
| 2018-11-17 02:34:07 -0600 | asked a question | Write pose near the detected ArUco tag Write pose near the detected ArUco tag Hi, I'm able to get pose of all the detected markers but i'm not able to display |
| 2018-11-16 03:41:48 -0600 | received badge | ● Enthusiast |
| 2018-11-15 03:22:12 -0600 | asked a question | ArUco detection using Real Sense D415 (stereo) ArUco detection using Real Sense D415 (stereo) Hi, I'm able to detect and get the pose of the marker using only the rgb |
| 2018-10-18 17:57:51 -0600 | asked a question | Can't detect the circle Can't detect the circle I tried using the function cv2.HoughCircles but it doesnt detect the hand drawn circle on the pa |
| 2018-10-02 04:41:23 -0600 | commented question | How to find position and orientation from an image? No, i haven't started actually. I just have two depth camera 90fps to track the ball. I wanted to know how it can be don |
| 2018-10-02 04:30:01 -0600 | commented question | How to find position and orientation from an image? U mean my progress? |
| 2018-10-02 04:16:40 -0600 | asked a question | How to find position and orientation from an image? How to find position and orientation from an image? Since i'm new to image and computer vision technique, i have red bal |