This forum is disabled, please visit https://forum.opencv.org
| 2019-02-21 05:15:59 -0600 | received badge | ● Popular Question (source) |
| 2017-02-17 13:29:40 -0600 | received badge | ● Notable Question (source) |
| 2015-12-16 08:29:36 -0600 | received badge | ● Popular Question (source) |
| 2014-12-09 03:51:16 -0600 | received badge | ● Nice Question (source) |
| 2013-03-20 21:17:24 -0600 | asked a question | Identifying and tracking hands in a scene I am trying to write a HandTracker application to identify and track human hands in a scene. I have tried a number of techniques, which I will detail here. I need your help to figure out the technique or combination of techniques I should use to be successful. What I have:
What I have tried:
After working on this for a week, I'm starting to get more than a little frustrated. I just want to do something simple like the hand tracking in OpenNI. Unfortunately, the OpenNI 1.5 code is so obfuscated that I can't even find the hand tracking portion. Does anyone have any ideas for how I can combine and/or refine these techniques on the color stream or incorporate the depth stream to achieve robust hand identification/tracking? |
| 2013-03-20 20:40:17 -0600 | answered a question | Arbitrary grayscale pixel range Got it thanks to berak! It seems so obvious after a good night's sleep. The scale value for and to convert to 8 bits: |
| 2013-03-18 10:09:13 -0600 | commented question | Arbitrary grayscale pixel range Thanks berak, that works. I would answer my own question, but the site won't let me for another 17 hours. |
| 2013-03-18 01:45:13 -0600 | received badge | ● Student (source) |
| 2013-03-17 03:35:51 -0600 | asked a question | Arbitrary grayscale pixel range I have a The problem is that Maybe using |
| 2013-03-14 11:52:08 -0600 | commented answer | cvtColor(): Bayer conversion scrambled pixels (channels?) Thanks! I spend hours on this last night. I can't believe it was just rows, cols instead of width, height. CV_8UC1 was right in this case. |
| 2013-03-14 11:49:09 -0600 | received badge | ● Supporter (source) |
| 2013-03-14 11:49:07 -0600 | received badge | ● Scholar (source) |
| 2013-03-13 21:36:27 -0600 | received badge | ● Editor (source) |
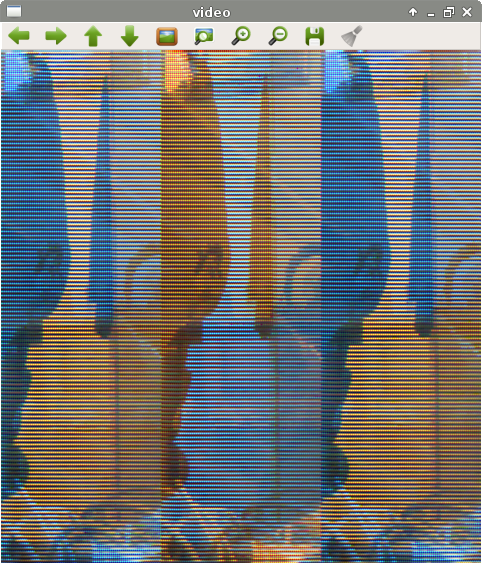
| 2013-03-13 21:34:27 -0600 | asked a question | cvtColor(): Bayer conversion scrambled pixels (channels?) I am new to OpenCV. I am trying to convert a cv::Mat of Bayer data to BGR. The input data is a 640*480 array of uint8_t. My code looks like this: BONUS QUESTION: Does the Mat constructor make a deep copy of the input data? But video_image looks like this:
I have tried CV_8UC3 and setting raw.step to 640*3. What am I missing? PS: I took a screenshot because the highgui save image button had no apparent effect on the filesystem. |