This forum is disabled, please visit https://forum.opencv.org
| 2017-07-06 08:57:53 -0600 | received badge | ● Famous Question (source) |
| 2016-03-13 17:43:52 -0600 | received badge | ● Notable Question (source) |
| 2015-11-18 04:24:28 -0600 | received badge | ● Popular Question (source) |
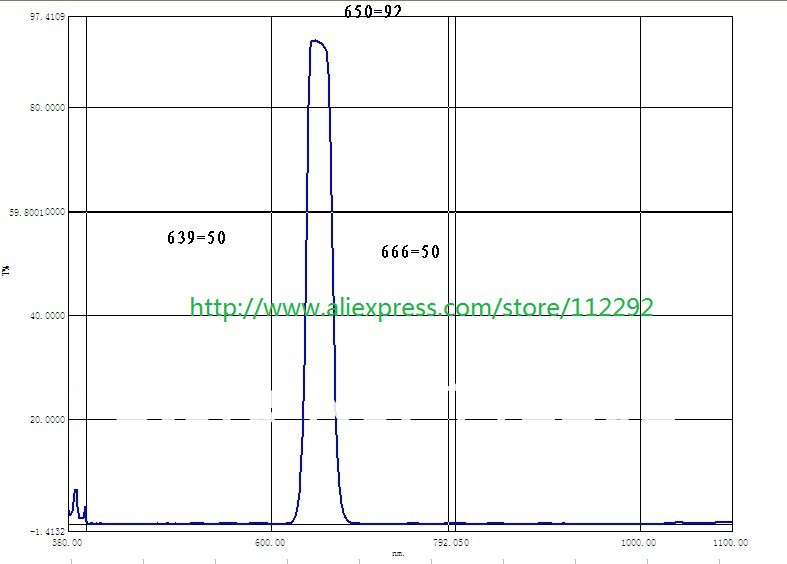
| 2015-02-09 14:06:27 -0600 | commented answer | Laser pointer detect and track Here is source image from cam with filter instaled, with windows and laser dot on the white window, Projector is set on max bright. Screenshot And here is polarized lens for 650nm wavelength bought for 5$ filter |
| 2015-02-07 03:13:55 -0600 | received badge | ● Self-Learner (source) |
| 2015-02-07 02:58:46 -0600 | answered a question | Laser pointer detect and track Polarized filter for 650nm wavelength, works perfect. With it code works stable. But must add mat inversion in code Thx FooBar and berak for tips |
| 2015-01-22 13:23:59 -0600 | commented question | Laser pointer detect and track Well.. most of red lasers pointers work in 650nm wavelength. I'm going to buy polarized filter, this one I will write the results here. |
| 2015-01-17 11:15:00 -0600 | commented question | Laser pointer detect and track So the problem of detection can be solved only by use some material filter on cam lense, I was thinking about it, but not sure what material to use. I will try to do as you said. |
| 2015-01-16 10:45:59 -0600 | received badge | ● Enthusiast |
| 2015-01-11 13:02:23 -0600 | commented question | Laser pointer detect and track I need to use the projector with the presenter (laser pointer for presentations, in my case SpeedLink ACUTE Presenter).Doesn't the infrared pointer have a too high voltage to be used safely for presentations? The red pointers are easy to find and thus widespread. The green and blue lasers are not sold officially in my country. Are there any functions that allow to calibrate the webcam before detect the laser dot? |
| 2015-01-11 11:55:45 -0600 | commented question | Laser pointer detect and track The problem is that the content will be dynamic, not only slides but also video and other moving content. |
| 2015-01-11 11:41:49 -0600 | commented question | Laser pointer detect and track now attached. just forgot to do it |
| 2015-01-11 11:37:26 -0600 | received badge | ● Editor (source) |
| 2015-01-11 11:29:38 -0600 | asked a question | Laser pointer detect and track I try to create an interactive projector using the method of laser pointer detecting by color, form and saturation. The projection itself is not static, it is dynamic and has a lot of white elements. It is also very important to exclude the possibility of a wrong response to the metallic light glares. Here is the code i tried to use to detect the laser with Visual C++: It is not possible to detect the laser pointer with this code even at the minimal brightness of the projector. All the more it will be necessary to use ... (more) |
{kind=link}
{kind=link}
{kind=link}