This forum is disabled, please visit https://forum.opencv.org
| 2017-06-16 02:58:32 -0600 | commented question | Not all convexity defects are being found WOW IT WORKED! Thanks a billion! Any idea what I was doing wrong? The java data structures for defects are a pain to figure out. |
| 2017-06-12 04:08:13 -0600 | commented question | Not all convexity defects are being found Yes, I get arrayindexoutofboundsexception if I do that. |
| 2017-06-12 03:57:21 -0600 | received badge | ● Enthusiast |
| 2017-06-09 07:01:31 -0600 | commented question | Not all convexity defects are being found defect.startPoint is already a point from the contour array of points. The problem is I don't get all of the defects from the image, the defects array is just too small. |
| 2017-06-08 08:49:21 -0600 | commented question | Not all convexity defects are being found Mind helping when you have time? I still haven't managed to solve this. |
| 2017-06-03 18:04:16 -0600 | commented question | Not all convexity defects are being found I have added the SkinDetector class code that will create the binary image. Also the drawer class that will show you how I output different stuff. |
| 2017-06-01 05:32:52 -0600 | commented question | Not all convexity defects are being found Ok, I changed them. Now if anyone could give me some pointers at what I'm doing wrong... |
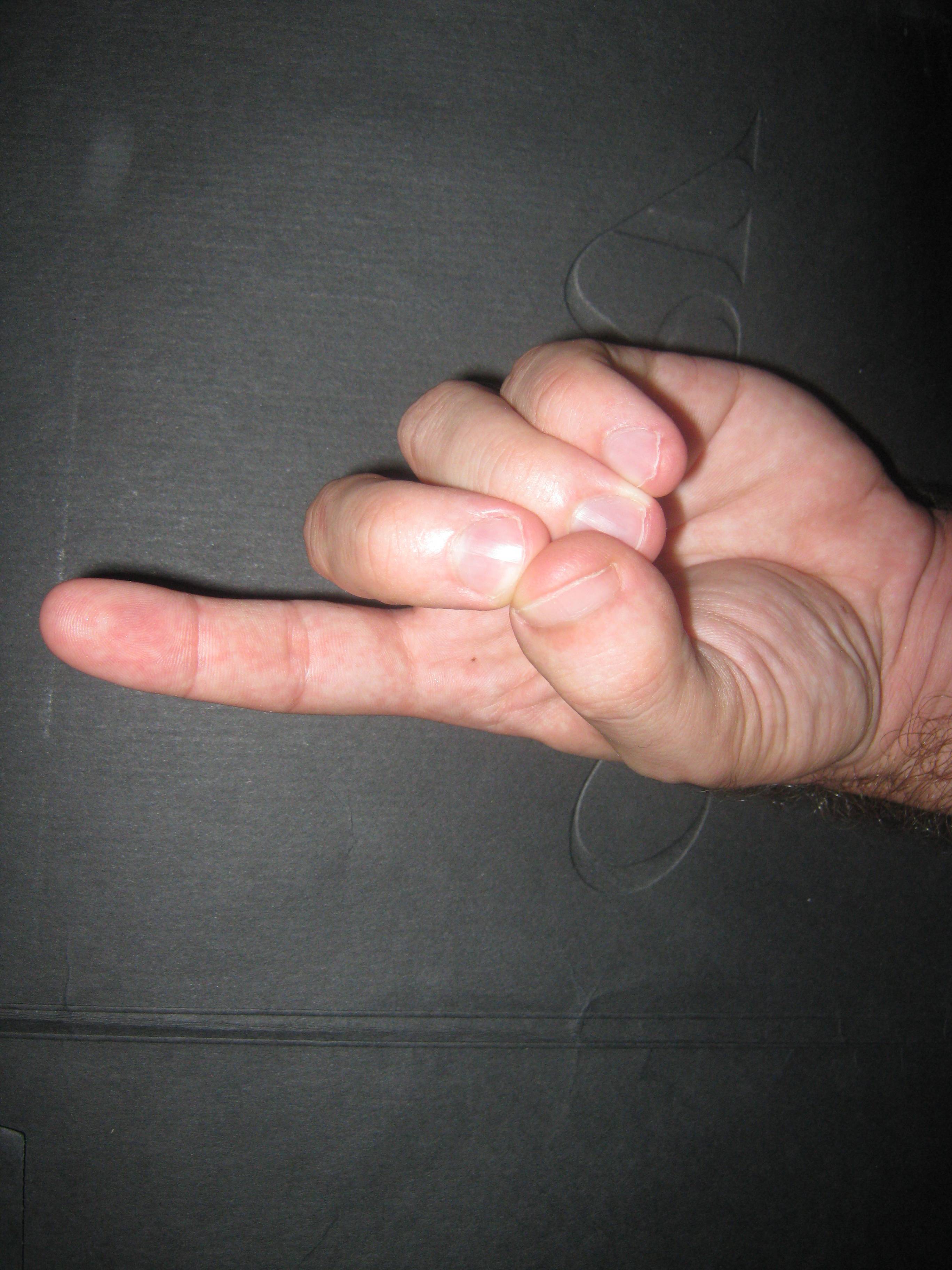
| 2017-05-31 08:48:05 -0600 | asked a question | Not all convexity defects are being found I wrote some code to detect convexity defects from a picture. I use opencv320 (tried 240 and got the exact same issue) and the code is Java.
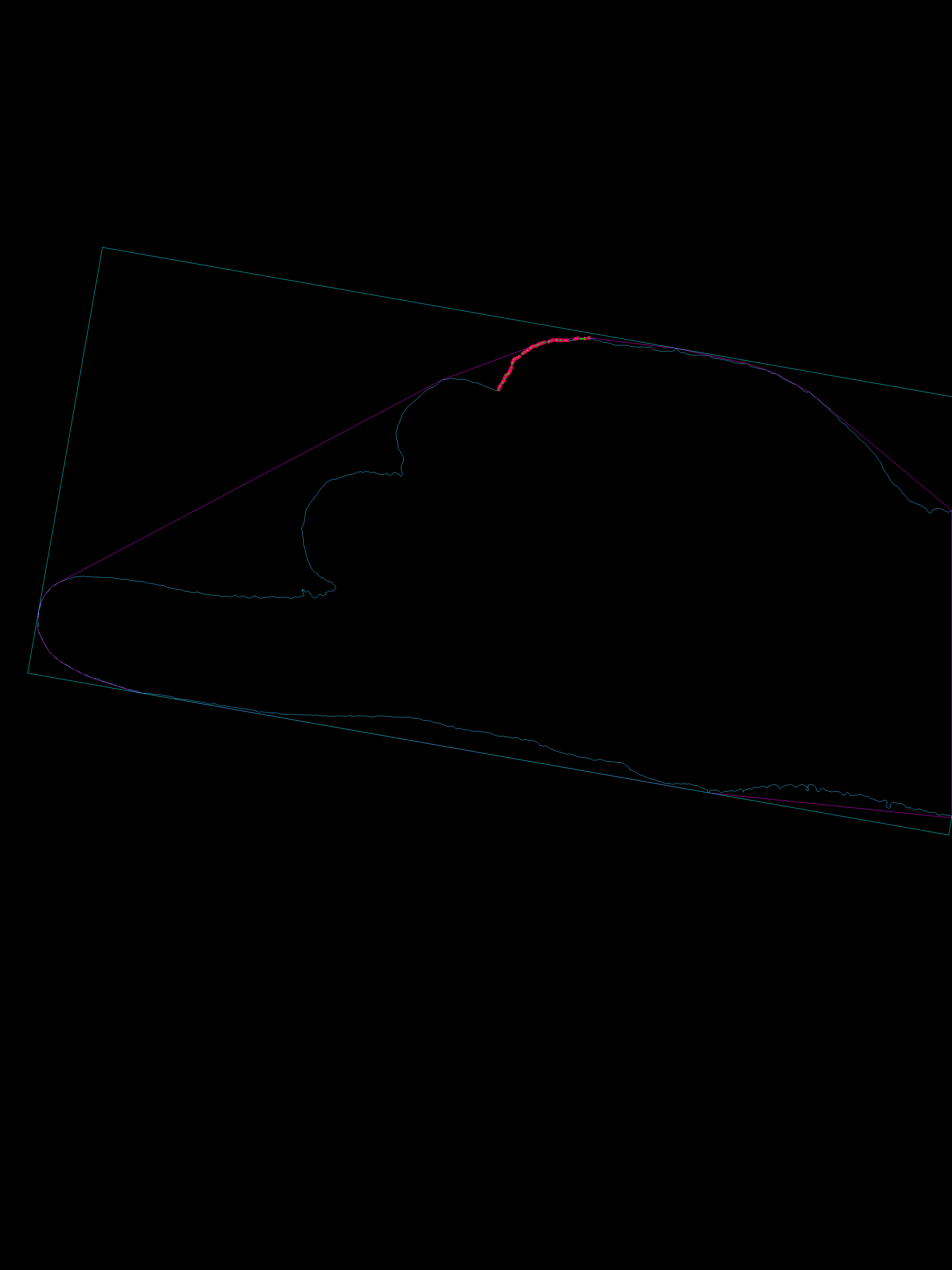
And the result is always the same, it stops at a point and I don't understand why:
As you see, I drew the bounding rectangle, the contour, the convex hull and when I want to calculate the convexity defects they are calculated only up until the ring finger starts. I think the problem is that I am getting way too few defects, around 20-30, but the Java function has really strange output when compared with the c++ one, it puts all the defects info in groups of 4 in the same array, really strange, so I've made an object to store it better. I think I calculate the contour and hull properly, because you can see in the image that it's displayed fully. This is the code I use, drawer is just another class that draws the specific points on the image, if you want I can provide it, too. I load the image, detect skin from the binary version, get the largest contour, get the hull and try to get the convexity defects. Skindetector class |