I am working on stereo calibration with these steps: 1. findChessborad -> cornerSubPix 2. stereoCalibrate to get R T E F 3.undistortPoints and computeCorrespondEpilines 4.stereoRectify to get R1 R2 P1 P2 Q 5.initUndistortRectifyMap to get remap matrix 6 remap
all the steps followed the cpp example given in the opencv package.
one pair of images I used as below:

the result I get is:
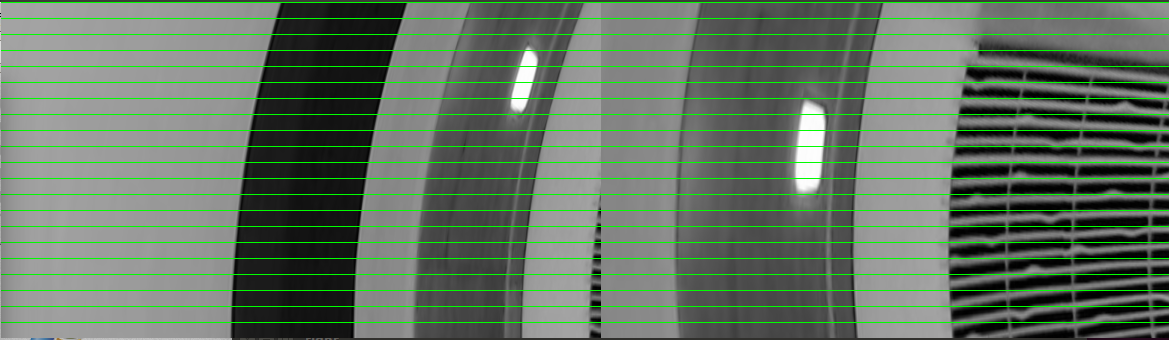
if I use : findFundamentalMat and stereoRectifyUncalibrated instead of stereorectify to get R1 R2 P1 P2 will get a correct result.
here is my code snapshot:
//FOR STD LIB
include <iostream>
include <string>
include <fstream>
include <iomanip>
include <algorithm>
include <iterator>
include <stdio.h>
include <stdlib.h>
include <ctype.h>
include <sstream>
//FOR OPENCVLIB
include "opencv2/opencv.hpp"
include "opencv2/calib3d.hpp"
include "opencv2/core/core.hpp"
include "opencv2/highgui/highgui.hpp"
include "opencv2/imgproc/imgproc.hpp"
include "opencv/cvaux.hpp"
//using namespace std; //using namespace cv;
define infinite 1e400
define numImagePairs 10
const std::string PathPrefix = "/home/roby/Developer/projects/Calibration_rectify/res/"; typedef std::vector<std::string> ImageNameList; typedef std::vector<cv::point2f> PointList; typedef std::vector<pointlist> LEFT_PointVec; typedef std::vector<pointlist> RIGHT_PointVec; typedef std::vector<std::vector<cv::point3f> > Point3DList; const cv::Size CHECKERBOARD_SIZE = cv::Size(7,6);
define BYTE unsigned char
int main(int argc, const char * argv[]) { ImageNameList rightCameraList; ImageNameList leftCameraList;
ImageNameList goodrightCameraList;
ImageNameList goodleftCameraList;
LEFT_PointVec leftCameraPTvec;
RIGHT_PointVec rightCameraPTvec;
Point3DList objectPoints;
int numGoodImgPairs = numImagePairs;
const float squareSize = 1.f; // Set this to your actual square size
cv::Size imageSize;
//load image name
std::ostringstream ss;
for (int i = 1; i <= numImagePairs; i++) {
ss << i;
rightCameraList.push_back(PathPrefix + "right/right"+ss.str() +".png");
leftCameraList.push_back(PathPrefix + "left/left"+ss.str() +".png");
ss.str(""); //clear stream content
}
for (int i = 0; i < numImagePairs; i++) {
cv::Mat rightimg = cv::imread(rightCameraList[i],0);
cv::Mat leftimg = cv::imread(leftCameraList[i],0);
if (rightimg.size != leftimg.size) {
std::cout<<"Left Image size != Right Image Size"<<std::endl;
return 0;
}else{
imageSize = rightimg.size();
}
rightimg.convertTo(rightimg, CV_8U);
leftimg.convertTo(leftimg, CV_8U);
PointList right_ptList;
PointList left_ptList;
if (cv::findChessboardCorners(rightimg, CHECKERBOARD_SIZE, right_ptList)) {
if (cv::findChessboardCorners(leftimg, CHECKERBOARD_SIZE, left_ptList)) {
cv::cornerSubPix(rightimg, right_ptList, cv::Size(11,11), cv::Size(-1,-1),
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS,
30, 0.01));
cv::cornerSubPix(leftimg, left_ptList, cv::Size(11,11), cv::Size(-1,-1),
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS,
30, 0.01));
rightCameraPTvec.push_back(right_ptList);
leftCameraPTvec.push_back(left_ptList);
goodleftCameraList.push_back(leftCameraList[i]);
goodrightCameraList.push_back(rightCameraList[i]);
}else{
numGoodImgPairs--;
std::cout<<"CHESSBOARD NOT FOUND in LEFT IMG!"<<std::endl;
}
}else{
numGoodImgPairs--;
std::cout<<"CHESSBOARD NOT FOUND in RIGHT IMG!"<<std::endl;
}
}
if (numGoodImgPairs < 2) {
std::cout<<"Error: too little pairs to run the calibration"<<std::endl;
return 0;
}
objectPoints.resize(numGoodImgPairs);
for( int i = 0; i < numGoodImgPairs; i++ )
{
for( int j = 0; j < CHECKERBOARD_SIZE.height; j++ )
for( int k = 0; k < CHECKERBOARD_SIZE.width; k++ )
objectPoints[i].push_back(cv::Point3f(k*squareSize, j*squareSize, 0));
}
cv::Mat cameraMatrix[2], distCoeffs[2];
cameraMatrix[0] = cv::Mat::eye(3, 3, CV_64F);
cameraMatrix[1] = cv::Mat::eye(3, 3, CV_64F);
cv::Mat R, T, E, F;
// FOR MORE INFO ABOUT distCoeffs : Read BOOK [learning OpenCV , Page:411]
double rms = cv::stereoCalibrate(objectPoints, leftCameraPTvec, rightCameraPTvec,
cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, E, F,
cv::CALIB_FIX_ASPECT_RATIO +
cv::CALIB_ZERO_TANGENT_DIST +
cv::CALIB_SAME_FOCAL_LENGTH +
cv::CALIB_RATIONAL_MODEL +
cv::CALIB_FIX_K3 + cv::CALIB_FIX_K4 + cv::CALIB_FIX_K5,
cv::TermCriteria(cv::TermCriteria::COUNT+cv::TermCriteria::EPS, 100, 1e-5) );
std::cout << "done with RMS error=" << rms << std::endl;
// CALIBRATION QUALITY CHECK
// because the output fundamental matrix implicitly
// includes all the output information,
// we can check the quality of calibration using the
// epipolar geometry constraint: m2^t*F*m1=0
double err = 0;
int npoints = 0;
std::vector<cv::Vec3f> lines[2];
for(int i = 0; i < numGoodImgPairs; i++ )
{
int npt = (int)leftCameraPTvec[i].size();
cv::Mat imgpt[2];
imgpt[0] = cv::Mat(leftCameraPTvec[i]);
imgpt[1] = cv::Mat(rightCameraPTvec[i]);
for(int k = 0; k < 2; k++ )
{
cv::undistortPoints(imgpt[k], imgpt[k], cameraMatrix[k], distCoeffs[k], cv::Mat(), cameraMatrix[k]);
cv::computeCorrespondEpilines(imgpt[k], k+1, F, lines[k]);
}
for(int j = 0; j < npt; j++ )
{
double errij = fabs(leftCameraPTvec[i][j].x*lines[1][j][0] +
leftCameraPTvec[i][j].y*lines[1][j][1] + lines[1][j][2]) +
fabs(rightCameraPTvec[i][j].x*lines[0][j][0] +
rightCameraPTvec[i][j].y*lines[0][j][1] + lines[0][j][2]);
err += errij;
}
npoints += npt;
}
std::cout << "average reprojection err = " << err/npoints << std::endl;
// save intrinsic parameters
cv::FileStorage fs(PathPrefix+"data/intrinsics.yml", cv::FileStorage::WRITE);
if( fs.isOpened() )
{
fs << "M1" << cameraMatrix[0] << "D1" << distCoeffs[0] <<
"M2" << cameraMatrix[1] << "D2" << distCoeffs[1];
fs.release();
}
else
std::cout << "Error: can not save the intrinsic parameters\n";
cv::Mat R1, R2, P1, P2, Q;
cv::Rect validRoi[2];
cv::stereoRectify(cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, R1, R2, P1, P2, Q,
cv::CALIB_ZERO_DISPARITY, 1, imageSize, &validRoi[0], &validRoi[1]);
fs.open(PathPrefix+"data/extrinsics.yml", cv::FileStorage::WRITE);
if( fs.isOpened() )
{
fs << "R" << R << "T" << T << "R1" << R1 << "R2" << R2 << "P1" << P1 << "P2" << P2 << "Q" << Q;
fs.release();
}
else
std::cout << "Error: can not save the extrinsic parameters\n";
// OpenCV can handle left-right
// or up-down camera arrangements
bool isVerticalStereo = fabs(P2.at<double>(1, 3)) > fabs(P2.at<double>(0, 3));
//=======================================================================
//
// SHOW RECTIFIED BELOW
//
//======================================================================
// COMPUTE AND DISPLAY RECTIFICATION
bool showRectified = true;
if( !showRectified )
return 0;
cv::Mat rmap[2][2];
// IF BY CALIBRATED (BOUGUET'S METHOD)
bool useCalibrated = true;
if( useCalibrated )
{
// we already computed everything
}
// OR ELSE HARTLEY'S METHOD
else
// use intrinsic parameters of each camera, but
// compute the rectification transformation directly
// from the fundamental matrix
{
std::vector<cv::Point2f> allimgpt[2];
for(int k = 0; k < 2; k++ )
{
for(int i = 0; i < numGoodImgPairs; i++ ){
if (0 == k) {
std::copy(leftCameraPTvec[i].begin(), leftCameraPTvec[i].end(), back_inserter(allimgpt[k]));
}else
std::copy(rightCameraPTvec[i].begin(), rightCameraPTvec[i].end(), back_inserter(allimgpt[k]));
}
}
F = cv::findFundamentalMat(cv::Mat(allimgpt[0]), cv::Mat(allimgpt[1]), cv::FM_8POINT, 0, 0);
cv::Mat H1, H2;
cv::stereoRectifyUncalibrated(cv::Mat(allimgpt[0]), cv::Mat(allimgpt[1]), F, imageSize, H1, H2, 3);
R1 = cameraMatrix[0].inv()*H1*cameraMatrix[0];
R2 = cameraMatrix[1].inv()*H2*cameraMatrix[1];
P1 = cameraMatrix[0];
P2 = cameraMatrix[1];
fs.open(PathPrefix+"data/extrinsics2.yml", cv::FileStorage::WRITE);
if( fs.isOpened() )
{
fs << "R" << R << "T" << T << "R1" << R1 << "R2" << R2 << "P1" << P1 << "P2" << P2 << "Q" << Q;
fs.release();
}
else
std::cout << "Error: can not save the extrinsic parameters\n";
}
//Precompute maps for cv::remap()
cv::initUndistortRectifyMap(cameraMatrix[0], distCoeffs[0], R1, P1, imageSize, CV_16SC2, rmap[0][0], rmap[0][1]);
cv::initUndistortRectifyMap(cameraMatrix[1], distCoeffs[1], R2, P2, imageSize, CV_16SC2, rmap[1][0], rmap[1][1]);
cv::Mat canvas;
double sf;
int w, h;
if( !isVerticalStereo )
{
sf = 600./MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h, w*2, CV_8UC3);
}
else
{
sf = 300./MAX(imageSize.width, imageSize.height);
w = cvRound(imageSize.width*sf);
h = cvRound(imageSize.height*sf);
canvas.create(h*2, w, CV_8UC3);
}
for(int i = 0; i < numGoodImgPairs; i++ )
{
for(int k = 0; k < 2; k++ )
{
cv::Mat img, rimg, cimg ;
if (0 == k) {
img = cv::imread(goodleftCameraList[i], 0) ;
}else{
img = cv::imread(goodrightCameraList[i],0);
}
cv::remap(img, rimg, rmap[k][0], rmap[k][1], cv::INTER_LINEAR);
cv::cvtColor(rimg, cimg, cv::COLOR_GRAY2BGR);
cv::Mat canvasPart = !isVerticalStereo ? canvas(cv::Rect(w*k, 0, w, h)) : canvas(cv::Rect(0, h*k, w, h));
cv::resize(cimg, canvasPart, canvasPart.size(), 0, 0, cv::INTER_AREA);
// if( useCalibrated )
// {
cv::Rect vroi(cvRound(validRoi[k].x*sf), cvRound(validRoi[k].y*sf),
cvRound(validRoi[k].width*sf), cvRound(validRoi[k].height*sf));
cv::rectangle(canvasPart, vroi, cv::Scalar(0,0,255), 3, 8);
// }
}
if( !isVerticalStereo )
for(int j = 0; j < canvas.rows; j += 16 )
cv::line(canvas, cv::Point(0, j), cv::Point(canvas.cols, j), cv::Scalar(0, 255, 0), 1, 8);
else
for(int j = 0; j < canvas.cols; j += 16 )
cv::line(canvas, cv::Point(j, 0), cv::Point(j, canvas.rows), cv::Scalar(0, 255, 0), 1, 8);
cv::imshow("rectified", canvas);
char c = (char)cv::waitKey();
if( c == 27 || c == 'q' || c == 'Q' )
break;
}
cv::waitKey(0);
return 0;
}
