Hello, I am trying to test the basic functionalities with aruco. I have two problems. I am getting an numpad_chunk() : invalid pointer error when the program ends (which is bad, but bearable). The second problem is that I can not detect the marker from the tutorial and it is found in the rejected candidates output. I have used the same dictionary as in the tutorial. What is the problem? My code is in c++ as follows:
#include "opencv2/opencv.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/videoio/videoio.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/aruco.hpp"
#include <vector>
using namespace cv;
using namespace std;
int main (int argc, char** argv)
{
VideoCapture cap;
if(!cap.open(0)){
return 0;
}
aruco::DetectorParameters parameters;
aruco::Dictionary dictionary = aruco::getPredefinedDictionary(aruco::DICT_6X6_250);
Ptr<aruco::Dictionary> dictionaryPtr(&dictionary) ;
Ptr<aruco::DetectorParameters> parametersPtr(¶meters);
for(;;){
Mat inputImage;
cap >> inputImage;
vector< int > markerIds;
vector< vector<Point2f> > markerCorners, rejectedCandidates;
aruco::detectMarkers(inputImage, dictionaryPtr, markerCorners, markerIds, parametersPtr, rejectedCandidates);
Mat outputImage = inputImage.clone();
aruco::drawDetectedMarkers(outputImage, markerCorners, markerIds);
cout << rejectedCandidates.size() << endl;
for(std::vector< vector<Point2f> >::iterator it = rejectedCandidates.begin(); it != rejectedCandidates.end(); ++it) {
vector<Point2f> sqPoints = *it;
//cout << sqPoints.size() << endl;
//Point pt2(it[1].x, it[1].y);
line(outputImage, sqPoints[0], sqPoints[1], CV_RGB(255, 0 , 0));
line(outputImage, sqPoints[2], sqPoints[1], CV_RGB(255, 0 , 0));
line(outputImage, sqPoints[2], sqPoints[3], CV_RGB(255, 0 , 0));
line(outputImage, sqPoints[0], sqPoints[3], CV_RGB(255, 0 , 0));
}
if(inputImage.empty()) break;
imshow("Webcam", outputImage);
if(waitKey(1) >= 0) break;
}
dictionaryPtr.release();
parametersPtr.release();
return 0;
}
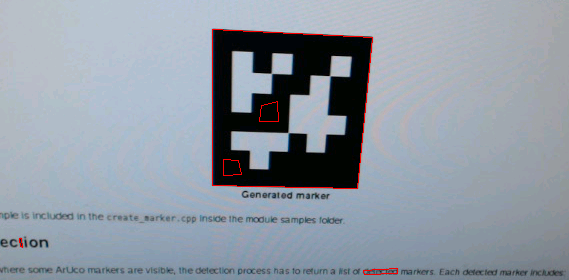
Here is a screenshot of what I am getting as output (I draw all rejected candidates with a red outline):
Any help would be appreciated.