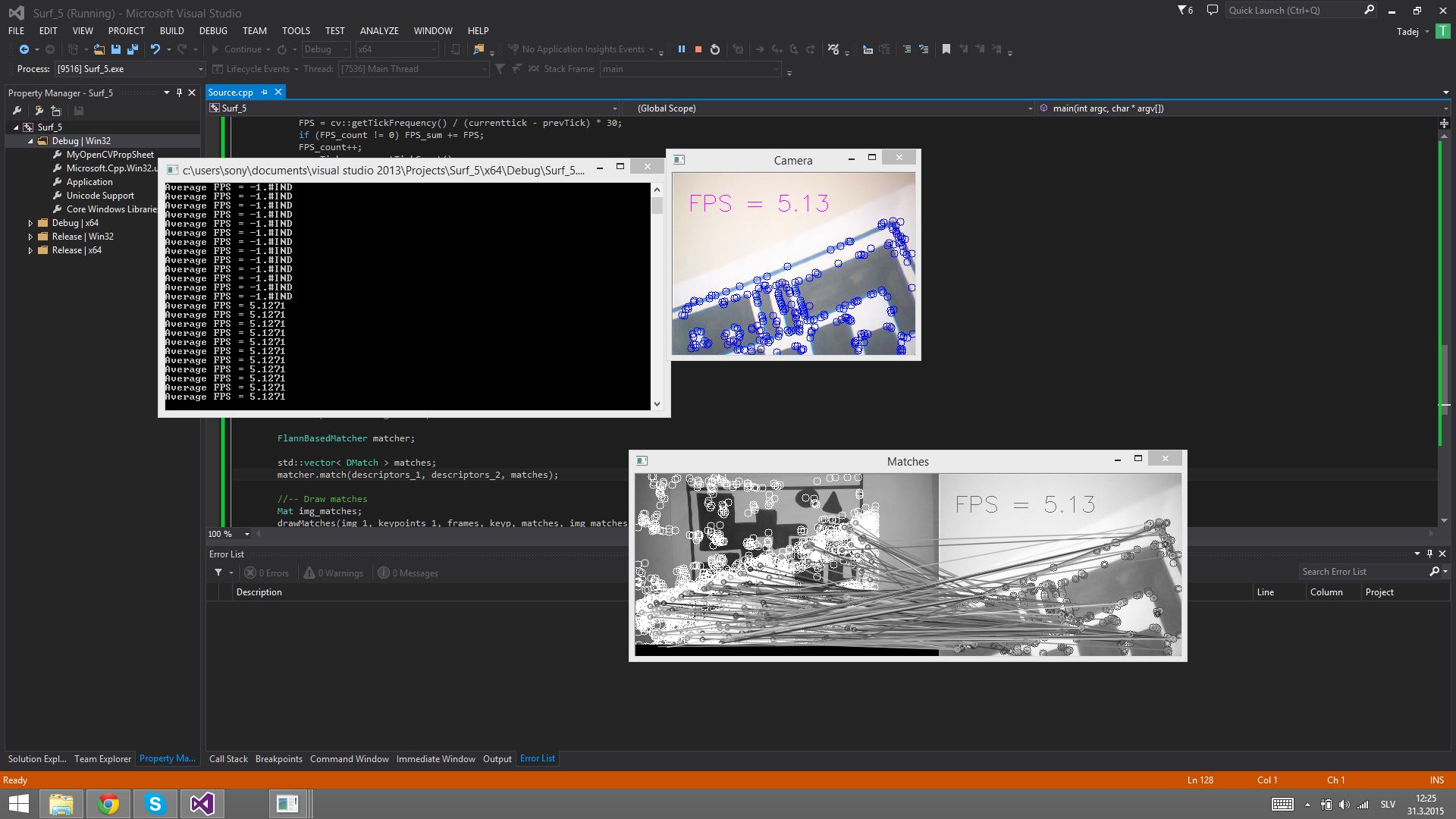
We would like to capture a video over the webcam (in real time) and then search for QR code and compare the code that we have found with a database of QR codes.
include "opencv2/calib3d/calib3d.hpp"
include "opencv2/nonfree/nonfree.hpp"
include "opencv2/core/core.hpp"
include "opencv2/features2d/features2d.hpp"
include <opencv2 highgui="" highgui.hpp="">
include <opencv2 imgproc="" imgproc.hpp="">
include <windows.h>
include <iostream>
include <stdio.h>
include <legacy\legacy.hpp>
include <cxcore.h>
using namespace cv; using namespace std;
void readme();
/* @function main */ int main(int argc, char argv[]) {
VideoCapture cam(1);
cam.set(CV_CAP_PROP_FRAME_HEIGHT, 240);
cam.set(CV_CAP_PROP_FRAME_WIDTH, 320);
cv::Mat frames, frames_1;
cv::Mat grayIm, grayIm_1;
double FPS = 0.;
double FPS_sum = 0.;
int FPS_count = 0;
long prevTick = 0;
int count = 0;
char str[256] = { '\0' };
Mat img_1 = imread("C:\\Users\\Sony\\Desktop\\slika_1.jpg", CV_LOAD_IMAGE_GRAYSCALE);
std::vector<KeyPoint> keypoints_1;
////
cam >> frames_1;
grayIm.create(frames_1.rows, frames_1.cols, frames_1.type());
cv::Ptr<cv::FeatureDetector> test_1 = cv::FeatureDetector::create("FAST");
////
std::vector<cv::KeyPoint> keyp;
if (!cam.isOpened())
return -1;
cam >> frames;
grayIm.create(frames.rows, frames.cols, frames.type());
cv::Ptr<cv::FeatureDetector> test = cv::FeatureDetector::create("FAST");
while (cv::waitKey(1) != 27){
cam >> frames_1;
cv::resize(frames_1, frames_1, cv::Size(), 1, 1);
cv::cvtColor(frames_1, grayIm_1, CV_RGB2GRAY);
test_1->detect(grayIm_1, keypoints_1);
for (int i = 0; i<keypoints_1.size(); i++)
cv::circle(img_1, cv::Point(keypoints_1[i].pt.x, keypoints_1[i].pt.y), 5, cv::Scalar(255, 0, 0, 255));
if (count == 0){
int currenttick = cv::getTickCount();
FPS = cv::getTickFrequency() / (currenttick - prevTick) * 30;
if (FPS_count != 0) FPS_sum += FPS;
FPS_count++;
prevTick = cv::getTickCount();
}
count = ++count % 30;
cam >> frames;
cv::resize(frames, frames, cv::Size(), 1, 1);
cv::cvtColor(frames, grayIm, CV_RGB2GRAY);
test->detect(grayIm, keyp);
for (int i = 0; i<keyp.size(); i++)
cv::circle(frames, cv::Point(keyp[i].pt.x, keyp[i].pt.y), 5, cv::Scalar(255, 0, 0, 255));
if (count == 0){
int currenttick = cv::getTickCount();
FPS = cv::getTickFrequency() / (currenttick - prevTick) * 30;
if (FPS_count != 0) FPS_sum += FPS;
FPS_count++;
prevTick = cv::getTickCount();
}
count = ++count % 30;
sprintf(str, "FPS = %0.2f\0", FPS);
cv::putText(frames, str, cv::Point(20, 50), CV_FONT_HERSHEY_SIMPLEX, 1, cv::Scalar(255, 0, 255, 0));
cv::imshow("Camera", frames);
cout << "Average FPS = " << FPS_sum / (FPS_count - 1) << std::endl;
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute(img_1, keypoints_1, descriptors_1);
extractor.compute(frames, keyp, descriptors_2);
//-- Step 3: Matching descriptor vectors with a brute force matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match(descriptors_1, descriptors_2, matches);
//-- Draw matches
Mat img_matches;
drawMatches(img_1, keypoints_1, frames, keyp, matches, img_matches);
cv::cvtColor(img_matches, img_matches, CV_RGB2GRAY);
//-- Show detected matches
imshow("Matches", img_matches);
}
}
/** @function readme */ void readme() { std::cout << " Usage: ./SURF_descriptor <img1> <img2>" << std::endl; }
///////////////////////////////////////////////WARNINGS//////////////////////////////////////
look ad the picture.!!!!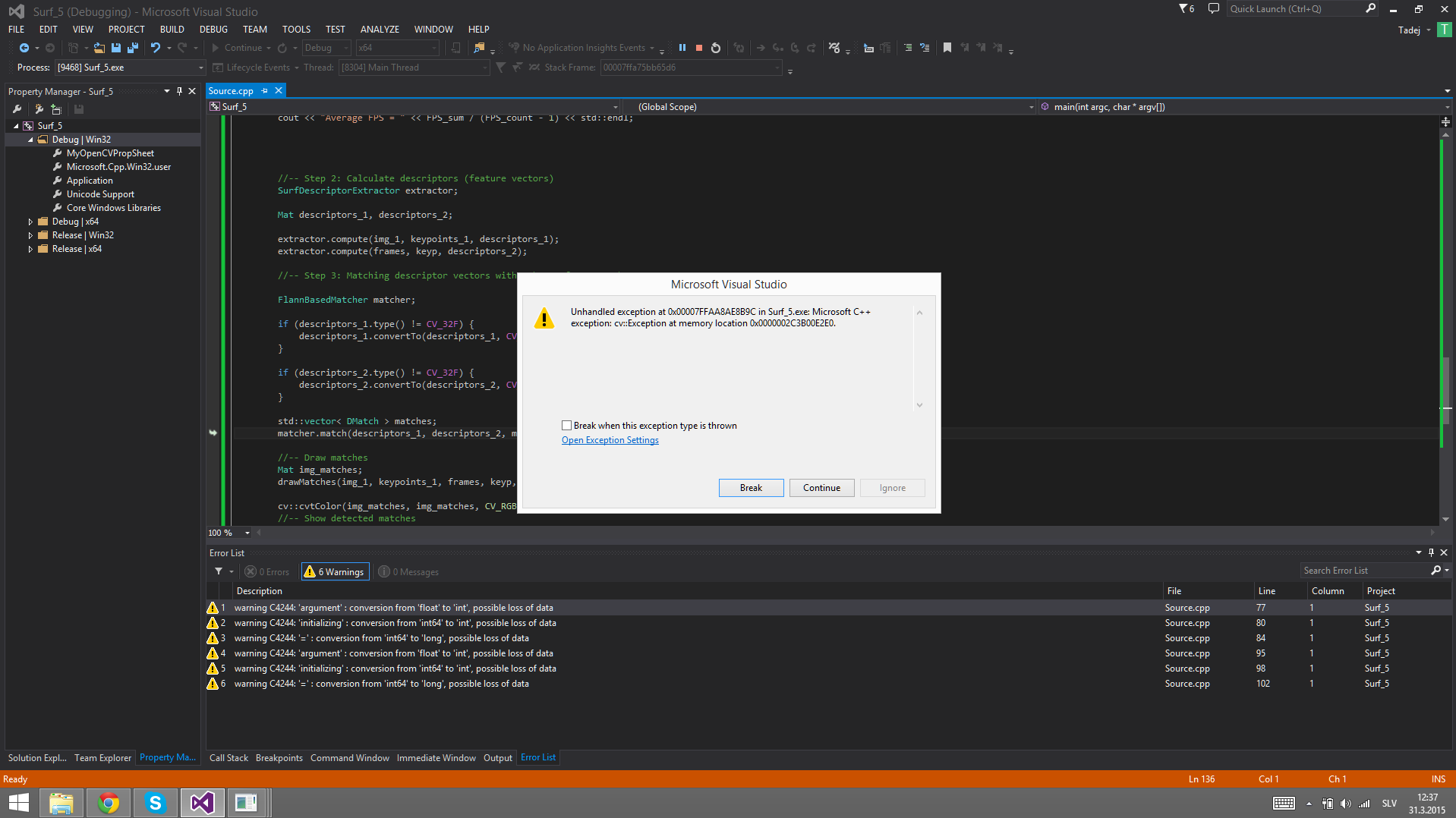 ... warning C4244: 'argument' : conversion from 'float' to 'int', possible loss of data......
... warning C4244: 'argument' : conversion from 'float' to 'int', possible loss of data......