How to use more than two cameras?
I tried on with C++, on Java, result one. More than two cameras bug. I try to just save images from the camera to a folder.
| | 1 | initial version |
How to use more than two cameras?
I tried on with C++, on Java, result one. More than two cameras bug. I try to just save images from the camera to a folder.
How to use more than two cameras?
I tried on with C++, on Java, result one. More than two cameras bug. I try to just save images from the camera to a folder.
enter code here
void CameraThread(int id) {
int sensivity = 30;
double maxArea = 30;
int widthFrame = 320;
int heightFrame = 160;
// для работы со списком камер
Mat *frameI = new Mat(heightFrame, widthFrame, CV_8UC3);
Mat *frameCurrentI = new Mat(heightFrame, widthFrame, CV_8UC3);
Mat *framePreviousI = new Mat(heightFrame, widthFrame, CV_8UC3);
Mat *frameResultI = new Mat(heightFrame, widthFrame, CV_8UC3);
Size *size = new Size(3, 3);
Mat *v = new Mat();
// open camera
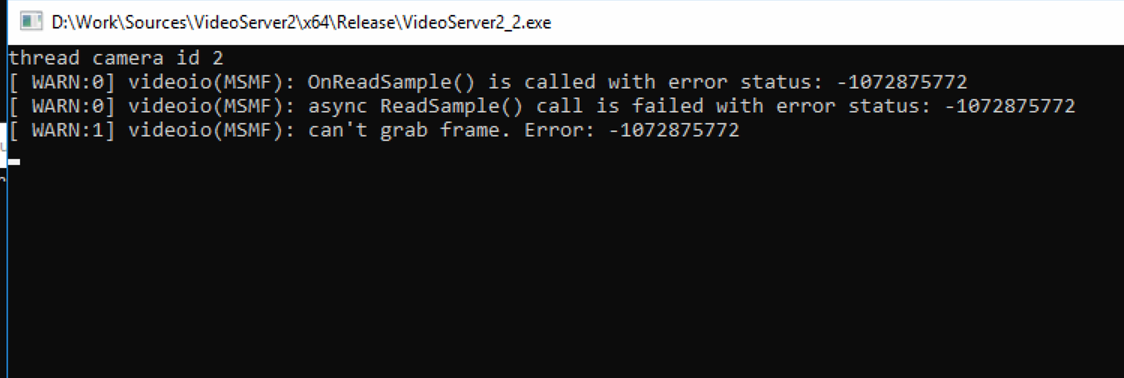
std::cout << "thread camera id " << id << std::endl;
VideoCapture cap(id);
cap.set(CAP_PROP_FRAME_WIDTH, widthFrame);
cap.set(CAP_PROP_FRAME_HEIGHT, heightFrame);
std::string filename;
filename.append("camera_");
filename.append(std::to_string(id));
filename.append(".jpg");
Mat frame;
while (true) {
if (!cap.grab()) {
printf("failed to grab from camera\n");
}
else
{
cap.read(frame);
if (frame.empty()) {
printf("failed to grab from camera\n");
}
else {
imwrite(filename, frame);
}
}
/*if (cap.read(frame)) {
m.lock();
cap >> frame;
imwrite(filename, frame);
m.unlock();
} */
//Sleep(1000);
}
}
int main() { std::thread t0(CameraThread, 2); t0.detach();
std::thread t1(CameraThread, 1);
t1.detach();
std::thread t2(CameraThread, 2);
t2.detach();
std::thread t3(CameraThread, 3);
t3.detach();
std::thread t4(CameraThread, 4);
t4.detach();
std::thread t5(CameraThread, 5);
t5.detach();
std::thread t6(CameraThread, 6);
t6.join();
waitKey();
return 0;
}
How to use more than two cameras?
I tried on with C++, on Java, result one. More than two cameras bug. I try to just save images from the camera to a folder.
enter code here
void CameraThread(int id) {
{
int sensivity = 30;
double maxArea = 30;
int widthFrame = 320;
int heightFrame = 160;
// для работы со списком камер
Mat *frameI = new Mat(heightFrame, widthFrame, CV_8UC3);
Mat *frameCurrentI = new Mat(heightFrame, widthFrame, CV_8UC3);
Mat *framePreviousI = new Mat(heightFrame, widthFrame, CV_8UC3);
Mat *frameResultI = new Mat(heightFrame, widthFrame, CV_8UC3);
Size *size = new Size(3, 3);
Mat *v = new Mat();
// open camera
std::cout << "thread camera id " << id << std::endl;
VideoCapture cap(id);
cap.set(CAP_PROP_FRAME_WIDTH, widthFrame);
cap.set(CAP_PROP_FRAME_HEIGHT, heightFrame);
std::string filename;
filename.append("camera_");
filename.append(std::to_string(id));
filename.append(".jpg");
Mat frame;
while (true) {
if (!cap.grab()) {
printf("failed to grab from camera\n");
}
else
{
{
cap.read(frame);
if (frame.empty()) {
printf("failed to grab from camera\n");
}
else {
imwrite(filename, frame);
}
}
/*if (cap.read(frame)) {
m.lock();
cap >> frame;
imwrite(filename, frame);
m.unlock();
} */
//Sleep(1000);
}
}
int main()
{
std::thread t0(CameraThread, 2);
t0.detach();
std::thread t1(CameraThread, 1);
t1.detach();
std::thread t2(CameraThread, 2);
t2.detach();
std::thread t3(CameraThread, 3);
t3.detach();
std::thread t4(CameraThread, 4);
t4.detach();
std::thread t5(CameraThread, 5);
t5.detach();
std::thread t6(CameraThread, 6);
t6.join();
waitKey();
return 0;
}
}
int main() { std::thread t0(CameraThread, 2); t0.detach();
std::thread t1(CameraThread, 1);
t1.detach();
std::thread t2(CameraThread, 2);
t2.detach();
std::thread t3(CameraThread, 3);
t3.detach();
std::thread t4(CameraThread, 4);
t4.detach();
std::thread t5(CameraThread, 5);
t5.detach();
std::thread t6(CameraThread, 6);
t6.join();
waitKey();
return 0;
}