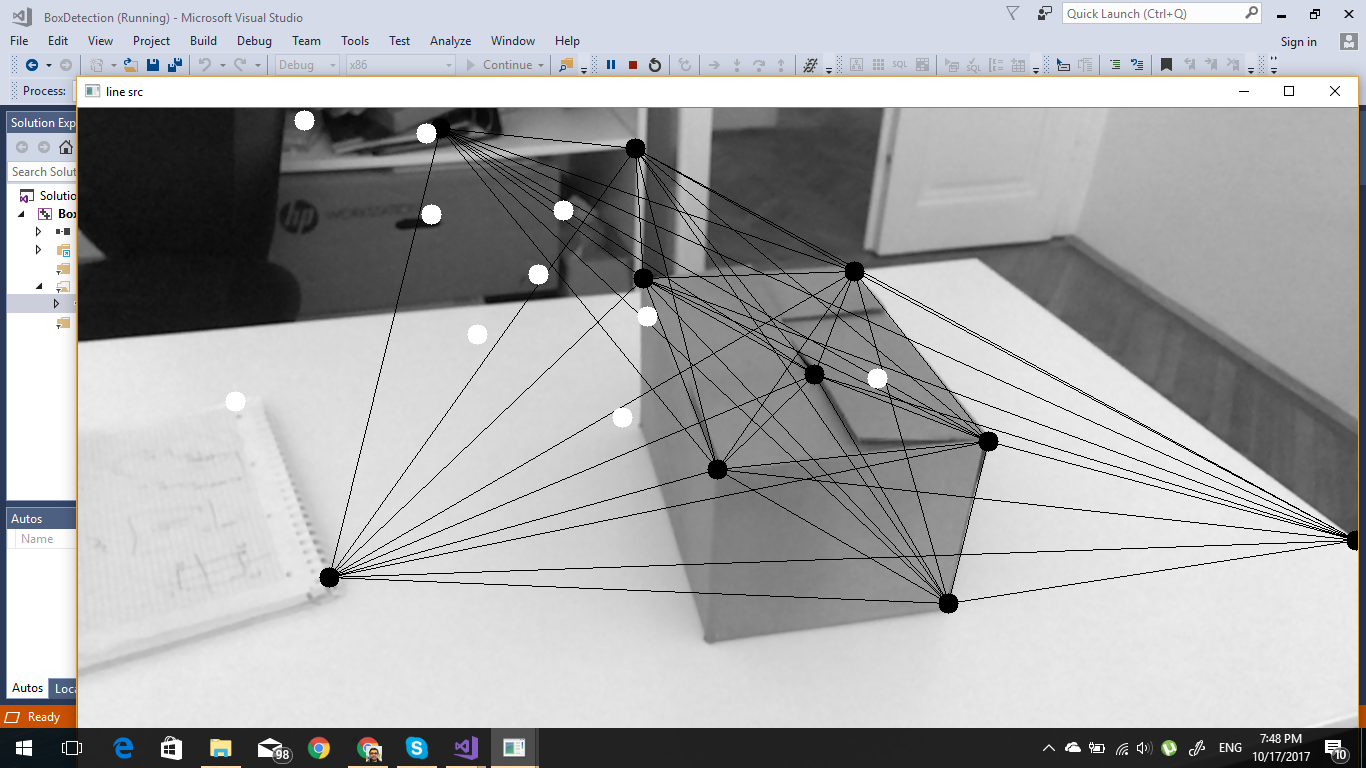
Step 1: I'm trying to detect the box volume. So I first detected the corners. The user will have a snap point and axis, so I will have a predefined point in world coordinates.
Step 2: I have converted the corner points into 3D Positions using the inverse camera internsics. Step 3: I have project rays, I have the ground plane at 0,0,0, those rays will intersect with a plane with normal UP.
Question: Now I want to know what are the points that are on the ground and what are the points that are above the ground.
Here is the code
struct Ray
{
cv::Vec3f origin;
cv::Vec3f direction;
};

bool linePlaneIntersection( Vec3f& contact, Vec3f direction, Vec3f rayOrigin,
Vec3f normal, Vec3f coord ) {
// get d value
float d = normal.dot(coord);
if ( normal.dot(direction) == 0 ) {
return false; // No intersection, the line is parallel to the plane
}
// Compute the X value for the directed line ray intersecting the plane
float x = (d - normal.dot(rayOrigin)) / normal.dot(direction);
// output contact point
contact = rayOrigin + normalize(direction)*x; //Make sure your ray vector is normalized
return true;
}
int main( int argc, char** argv )
{
Mat src, src_copy, edges, dst;
src = imread( "freezeFrame__1508152029892.png", 0 );
src_copy = src.clone();
std::vector< cv::Point2f > corners;
// maxCorners – The maximum number of corners to return. If there are more corners
// than that will be found, the strongest of them will be returned
int maxCorners = 10;
// qualityLevel – Characterizes the minimal accepted quality of image corners;
// the value of the parameter is multiplied by the by the best corner quality
// measure (which is the min eigenvalue, see cornerMinEigenVal() ,
// or the Harris function response, see cornerHarris() ).
// The corners, which quality measure is less than the product, will be rejected.
// For example, if the best corner has the quality measure = 1500,
// and the qualityLevel=0.01 , then all the corners which quality measure is
// less than 15 will be rejected.
double qualityLevel = 0.01;
// minDistance – The minimum possible Euclidean distance between the returned corners
double minDistance = 20.;
// mask – The optional region of interest. If the image is not empty (then it
// needs to have the type CV_8UC1 and the same size as image ), it will specify
// the region in which the corners are detected
cv::Mat mask;
// blockSize – Size of the averaging block for computing derivative covariation
// matrix over each pixel neighborhood, see cornerEigenValsAndVecs()
int blockSize = 3;
// useHarrisDetector – Indicates, whether to use operator or cornerMinEigenVal()
bool useHarrisDetector = false;
// k – Free parameter of Harris detector
double k = 0.04;
cv::goodFeaturesToTrack( src, corners, maxCorners, qualityLevel, minDistance, mask, blockSize, useHarrisDetector, k );
for ( size_t i = 0; i < corners.size(); i++ )
{
cv::circle( src, corners[i], 10, cv::Scalar( 0, 255, 255 ), -1 );
}
for ( size_t i = 0; i < corners.size(); i++ )
{
cv::Point2f pt1 = corners[i];
for ( int j = 0; j < corners.size(); j++)
{
cv::Point2f pt2 = corners[j];
line( src, pt1, pt2, cv::Scalar( 0, 255, 0 ) );
}
}
Mat cameraIntrinsics( 3, 3, CV_32F );
cameraIntrinsics.at<float>( 0, 0 ) = 1.6003814935684204;
cameraIntrinsics.at<float>( 0, 1 ) = 0;
cameraIntrinsics.at<float>( 0, 2 ) = -0.0021958351135253906;
cameraIntrinsics.at<float>( 1, 0 ) = 0;
cameraIntrinsics.at<float>( 1, 1 ) = 1.6003814935684204;
cameraIntrinsics.at<float>( 1, 2 ) = -0.0044271680526435375;
cameraIntrinsics.at<float>( 2, 0 ) = 0;
cameraIntrinsics.at<float>( 2, 1 ) = 0;
cameraIntrinsics.at<float>( 2, 2 ) = 1;
Mat invCameraIntrinsics = cameraIntrinsics.inv();
std::vector<cv::Point3f> points3D;
std::vector<Ray> rays;
for ( int i = 0; i < corners.size(); i++ )
{
cv::Point3f pt;
pt.z = -1.0f;
pt.x = corners[i].x;
pt.y = corners[i].y;
points3D.push_back( pt );
Ray ray;
ray.origin = Vec3f( 0, 0, 0 );
ray.direction = Vec3f( pt.x, pt.y, pt.z );
rays.push_back( ray );
}
std::vector<cv::Point3f> pointsTransformed3D;
cv::transform( points3D, pointsTransformed3D, invCameraIntrinsics );
std::vector<cv::Vec3f> contacts;
for ( int i = 0; i < pointsTransformed3D.size(); i++ )
{
Vec3f pt(pointsTransformed3D[i].x, pointsTransformed3D[i].y, pointsTransformed3D[i].z );
cv::Vec3f contact;
linePlaneIntersection( contact, rays[i].direction, rays[i].origin, Vec3f( 0, 1, 0 ), pt );
contacts.push_back( contact );
}
for ( size_t i = 0; i < points3D.size(); i++ )
{
cv::Point2f pt;
pt.x = pointsTransformed3D[i].x;
pt.y = pointsTransformed3D[i].y;
cv::circle( src, pt, 10, cv::Scalar( 255. ), -1 );
}
imshow( "line src", src );
cv::waitKey( 0 );
return 0;
}
 Here is the code
Here is the code