Good Day!
The program works(OpenCV 3), but uses only the CPU. How to use GPU(The system determines the graphics card)?C:\fakepath\2017-08-20_17-13-57.png
ocl::setUseOpenCL(true);
if (!ocl::haveOpenCL())
{
cout << "OpenCL is not available..." << endl;
//return;
}
cv::ocl::Context context;
if (!context.create(cv::ocl::Device::TYPE_GPU))
{
cout << "Failed creating the context..." << endl;
//return;
}
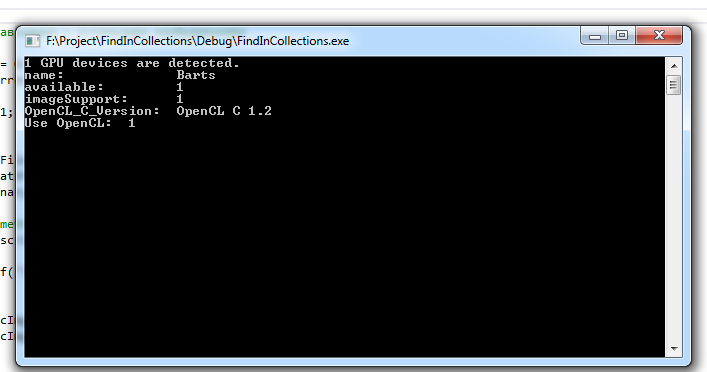
cout << context.ndevices() << " GPU devices are detected." << endl; //This bit provides an overview of the OpenCL devices you have in your computer
for (int i = 0; i < context.ndevices(); i++)
{
int tmp = 0;
if (cv::ocl::useOpenCL() == true) tmp = 1;
cv::ocl::Device device = context.device(i);
cout << "name: " << device.name() << endl;
cout << "available: " << device.available() << endl;
cout << "imageSupport: " << device.imageSupport() << endl;
cout << "OpenCL_C_Version: " << device.OpenCL_C_Version() << endl;
cout << "Use OpenCL: " << tmp << endl;
cout << endl;
}
//UMat img1 = imread("F:\\Project\\Data\\X.jpg", IMREAD_GRAYSCALE).getUMat(ACCESS_READ);
Mat img1 = imread("F:\\Project\\Data\\X.jpg", IMREAD_GRAYSCALE);
float fTimeStartAll = clock() / (float)CLOCKS_PER_SEC;
vector<double> desMethCmp;
Ptr<Feature2D> b = BRISK::create();
Ptr<DescriptorMatcher> descriptorMatcher;
// Match between img1 and img2
vector<DMatch> matches;
// keypoint for img1 and img2
vector<KeyPoint> keyImg1, keyImg2;
// Descriptor for img1 and img2
Mat descImg1, descImg2;
// We can detect keypoint with detect method
b->detect(img1, keyImg1, Mat());
// and compute their descriptors with method compute
b->compute(img1, keyImg1, descImg1);
int tmp = 0;
sprintf(pathCatalog, "F:\\Project\\");
numberPage = 509;
tmp = 0;
int bestList = 0;
double bestCurrent = 10000000;
for (int j = 1; j < numberPage; j++)
{
tmp++;
char pathFile[256];
sprintf(pathFile, "%s%d.mat", pathCatalog, j);
LoadMatBinary(pathFile, descImg2);
// Match method loop
if (b->descriptorType() == CV_32F || b->defaultNorm() <= NORM_L2SQR)
{
printf("It's strange. You should use Hamming distance only for a binary descriptor");
};
UMat UdescImg1 = descImg1.getUMat(cv::ACCESS_READ, cv::USAGE_ALLOCATE_DEVICE_MEMORY);
UMat UdescImg2 = descImg2.getUMat(cv::ACCESS_READ, cv::USAGE_ALLOCATE_DEVICE_MEMORY);
descriptorMatcher = cv::DescriptorMatcher::create("BruteForce-Hamming");
descriptorMatcher->match(UdescImg1, UdescImg2, matches, noArray());