PointsClouds Generated by Reporjectimageto3D is So Bad
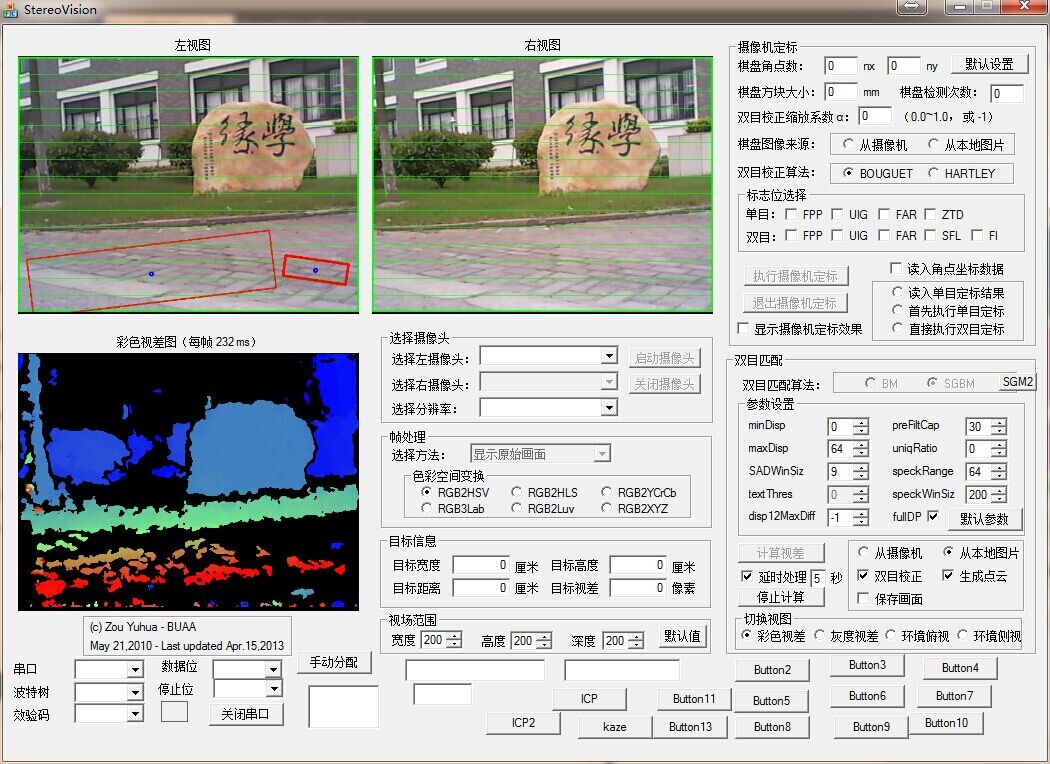
Disparity image seems well but Points Clouds is too bad, anyone catch the problem?
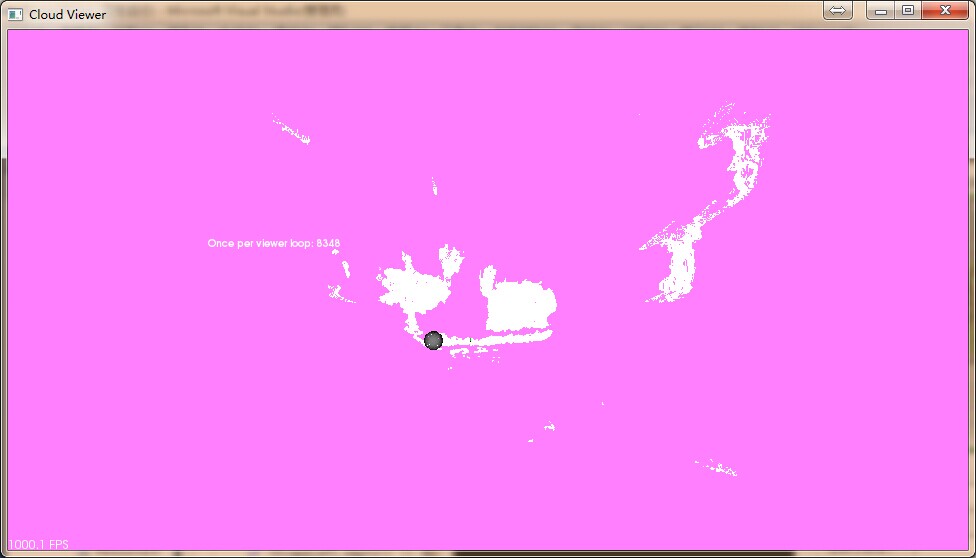 You can find that coordinate x,y are ok, while z is far from reality.
You can find that coordinate x,y are ok, while z is far from reality.
In order to help you, you should provide parts of the relevant code. Debugging from just two images is hard :-)
This the code to getting points clouds- - if (disparity.empty()) { return 0; }
Q is right, error rate is only 0.181
I recognize that you were using Yuhua Zou's program- I've tried his program and it worked perfectly (from getting good disparity map to getting good point cloud). So my suggestion is change BM/SGBM's parameters and play with them, the disparity map you got is really not good enough in order to get a good point cloud.
For me, I just use BM and results are pretty good. SGBM is too slow for me.
Hope it helps.