This forum is disabled, please visit https://forum.opencv.org
| 2018-08-10 01:43:28 -0600 | received badge | ● Popular Question (source) |
| 2014-09-26 14:45:30 -0600 | commented question | Opencv Repeatability Result not make sense? zedv thanks for your answer . i answered your comment on stackoverflow .by the way thanks for joining both opencv and Stackoverflow for helping. |
| 2014-09-25 00:54:51 -0600 | commented question | Opencv Repeatability Result not make sense? @thdrksdfthmn its getting worse on other image sequence . i use mikolajczyk Dataset. if i use function of opencv for changing image such as adding noise, rotation , GaussianBlur filter and ... the repeatability values match the result of formula. same code for finding keypoints have been use in these two case. |
| 2014-09-23 05:17:36 -0600 | asked a question | Opencv Repeatability Result not make sense? Hi i'm trying to evaluate SIFT and SURF Detectors by Repeatability criteria. i find out that below method can find Repeatability ,Correspondence of SIFT and SURF some of the result are listed below: for first row repeatibility can compute as --> (correnspond)/min(keypoint1st,keypoint2th) = (140/180) = 0.7777778 but for other rows it's value is different from what i compute with above formula. can somebody tell why is that happening? Best Regards. |
| 2014-08-23 09:55:29 -0600 | asked a question | synthesis Rotation Repeatability with SIFT and SURF Hi i rotate images with below code which i find on Stackoverflow website and compute homography with below code which i have written: you can see that i made condition for 90 and 270 degrees since correspondence point was 0 when i evaluated rotated images with reference image with : cv::evaluateFeatureDetector(img_1c, img_2c, h12, &key_points_1, &key_points_2, repeatability, corrCounter); it's also happennig for 80 110 280 and 260 degrees . i don't know if i compute homographies incorrectly or the rotation procedure ... (more) |
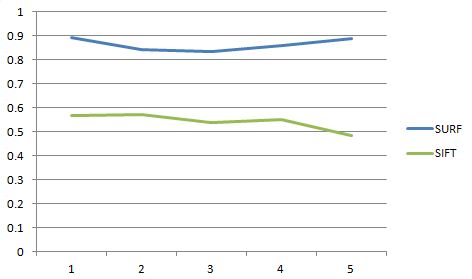
| 2014-08-21 00:48:01 -0600 | commented question | How come Surf Detector is better than Sift in my code x-axis is the sequence of blur images. |
| 2014-08-20 12:06:55 -0600 | asked a question | How come Surf Detector is better than Sift in my code Hi Hi i'm evaluating SIFT and SURF Detectors in my project with mikolajczyk Dataset. you can find it here:http://www.robots.ox.ac.uk/~vgg/research/affine/ according to below papers SIFT should outperform SURF in scale, blur and rotation changes: "A performance evaluation of SIFT and SURF for multispectral image matching" "A Comparison of SIFT, PCA-SIFT and SURF" Same Dataset has been used. "SIFT and SURF Performance Evaluation Against Various Image Deformations on Benchmark Dataset" i get below result for Bike (Blur) images
i also used below codes for SIFT and SURF detector: (it's main code and not all of it) //Notice That SIFT and SURF code run separately and variables not getting overwrite. Did i miss something ? why my results is different?(also checked scale and rotation change and still SURF outperform SIFT) |
| 2014-07-11 03:01:30 -0600 | received badge | ● Supporter (source) |
| 2014-07-08 06:25:35 -0600 | commented question | evaluate SIFT and SURF Thanks steven. i would appreciate if you guide me and show me the way of how can i write it. |
| 2014-07-08 02:20:32 -0600 | received badge | ● Editor (source) |
| 2014-07-08 01:28:27 -0600 | received badge | ● Student (source) |
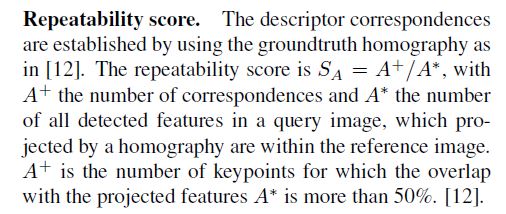
| 2014-07-08 00:25:23 -0600 | asked a question | evaluate SIFT and SURF Hi i need to evaluate SIFT and SURF with some criteria that mentioned on these papers "A comparison to SIFT PCA-SIFT and SURF" which can be found here : http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.301.7041 and "Evaluation of Local Detectors and Descriptors for Fast Feature Matching" which you can download it from miksik.co.uk/papers/miksik2012icpr.pdf . i noticed that each paper defined repeatibility differently. in first paper it has been defined
and in second paper
which one should i use for SIFT and SURF evaluation? and also in OpenCV i found a function named evaluateFeatureDetector. (simple code: cv::evaluateFeatureDetector(img_1c, img_2c, h12, &key_points_1, &key_points_2, repeatability, corrCounter);) i want to know that which formula OpenCV use for finding repeatibility. also how can i find Precision-recall in OpenCV. Edited : find evaluateGenericDescriptorMatcher method which can be used for finding recalls. don't know how to use it. also couldn't find any documentation for it. Best Regards |