This forum is disabled, please visit https://forum.opencv.org
| 2012-11-09 03:39:12 -0600 | commented answer | cv::undistort returns corrupt image hi thx for your reply! image_RGB is just a struct with "uchar * data" R-channel (640x480) then G-channel (640x480) and then B-channel (640x480). |
| 2012-11-07 11:57:08 -0600 | asked a question | cv::undistort returns corrupt image Hi original image:
image after undistort:
my code: i hope some one can tell me what im doing wrong :( |
| 2012-10-24 11:06:11 -0600 | asked a question | 6-Channel image and 3D Reconstruction and visualization Hi! how can i visualize an 6-Channel Image [X Y Z R G B] (as double *). Is there any openCV function to do it? I would like to get it like this Kinect color-depth cameras calibration |
| 2012-10-16 10:18:43 -0600 | received badge | ● Scholar (source) |
| 2012-10-16 03:52:58 -0600 | received badge | ● Supporter (source) |
| 2012-10-12 05:27:45 -0600 | received badge | ● Student (source) |
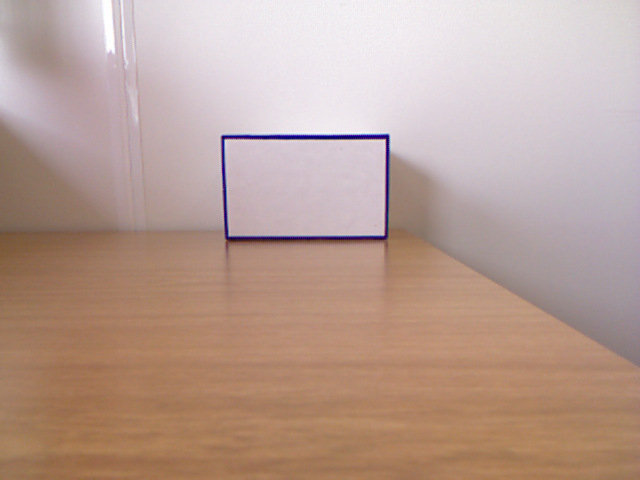
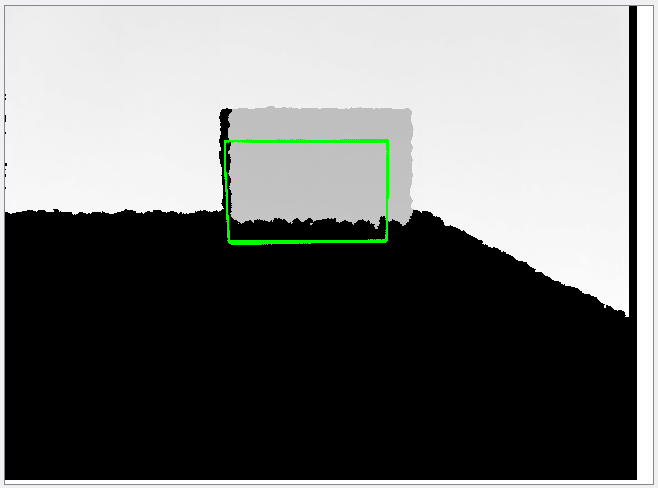
| 2012-10-12 05:24:10 -0600 | asked a question | Calculate Translation-Rotation Matrix for RGBD-Kinect data Hi i captured with Kinect a box on the table. I colored the edge so i can project a binarized rgb image into a depth image. (see images below) As you can see there rgb and depth image are not equal. Question: i want to select 4 corners on rgb image and 4 corners on depth image. is there any opencv function to calculate Translation/Rotation Matrix by using these informations? thx Kinect-RGB
Kinect-Depth
|