This forum is disabled, please visit https://forum.opencv.org
| 2020-04-15 21:01:21 -0600 | received badge | ● Necromancer (source) |
| 2020-04-15 20:59:16 -0600 | received badge | ● Great Question (source) |
| 2020-04-14 03:58:41 -0600 | answered a question | Solve PNP error : EPNP and P3P failed I took the liberty of bringing up this really old question as I seem to have a similar problem, but I do not understand |
| 2020-04-14 03:27:02 -0600 | commented answer | 2 Euro Coin detector which Country is it? Is it front or backside from this coin? What about the comment by StevenPuttemans? Did you give it a try? |
| 2020-04-13 17:38:20 -0600 | commented answer | 2 Euro Coin detector which Country is it? Is it front or backside from this coin? What about the comment by StevePuttermans? Did you give it a try? |
| 2020-02-07 16:37:24 -0600 | commented question | Calculating Object coordinates look for planar homography on the web |
| 2019-10-30 04:41:05 -0600 | received badge | ● Nice Answer (source) |
| 2019-10-05 16:58:23 -0600 | commented question | How do i multi thread OpenCV? Or make it run on GPU pipeline The SURF function is parallelized with the TBB library, so perhaps you should rebuild OpenCV with TBB support. |
| 2019-10-03 16:53:58 -0600 | commented question | camera calibration focal length is wrong Just thinking.... 640x360 ratio is clearly different from 4224x3136. How is the small image created? It cannot be the sc |
| 2019-10-03 14:10:44 -0600 | commented question | camera calibration focal length is wrong I made a mistake above - your focal length will not be in mm but always in pixels - my bad. I have no idea how I managed |
| 2019-10-03 04:48:48 -0600 | commented question | camera calibration focal length is wrong I am not sure (I don't use Python) but I think your results are now expressed in square size units (so f=100 means your |
| 2019-10-03 04:45:43 -0600 | commented question | camera calibration focal length is wrong I am not sure (I don't use Python) but I think your results are now expressed in square size units and if you want it in |
| 2019-10-03 04:45:05 -0600 | commented question | camera calibration focal length is wrong I am not sure (I don't use Python) but I think your results are now expressed in square size units and if you want it in |
| 2019-10-03 04:44:21 -0600 | commented question | camera calibration focal length is wrong I am not sure (I don't use Python) but I think your results are now expressed in square size units and if you want it in |
| 2019-10-02 18:42:03 -0600 | commented question | camera calibration focal length is wrong Keeping constant distance to the chessboard is not necessary nor recommended. Perhaps you did not set the chessboard sq |
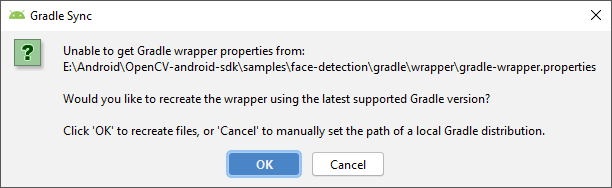
| 2019-10-02 14:57:11 -0600 | marked best answer | How to run OpenCV Android Samples in Android Studio? I have been trying to run these samples for several hours, but I failed. I followed this tutorial successfully, but whenever I import any of the OpenCV Android samples I run into problems. At first, right after I import a project I get this:
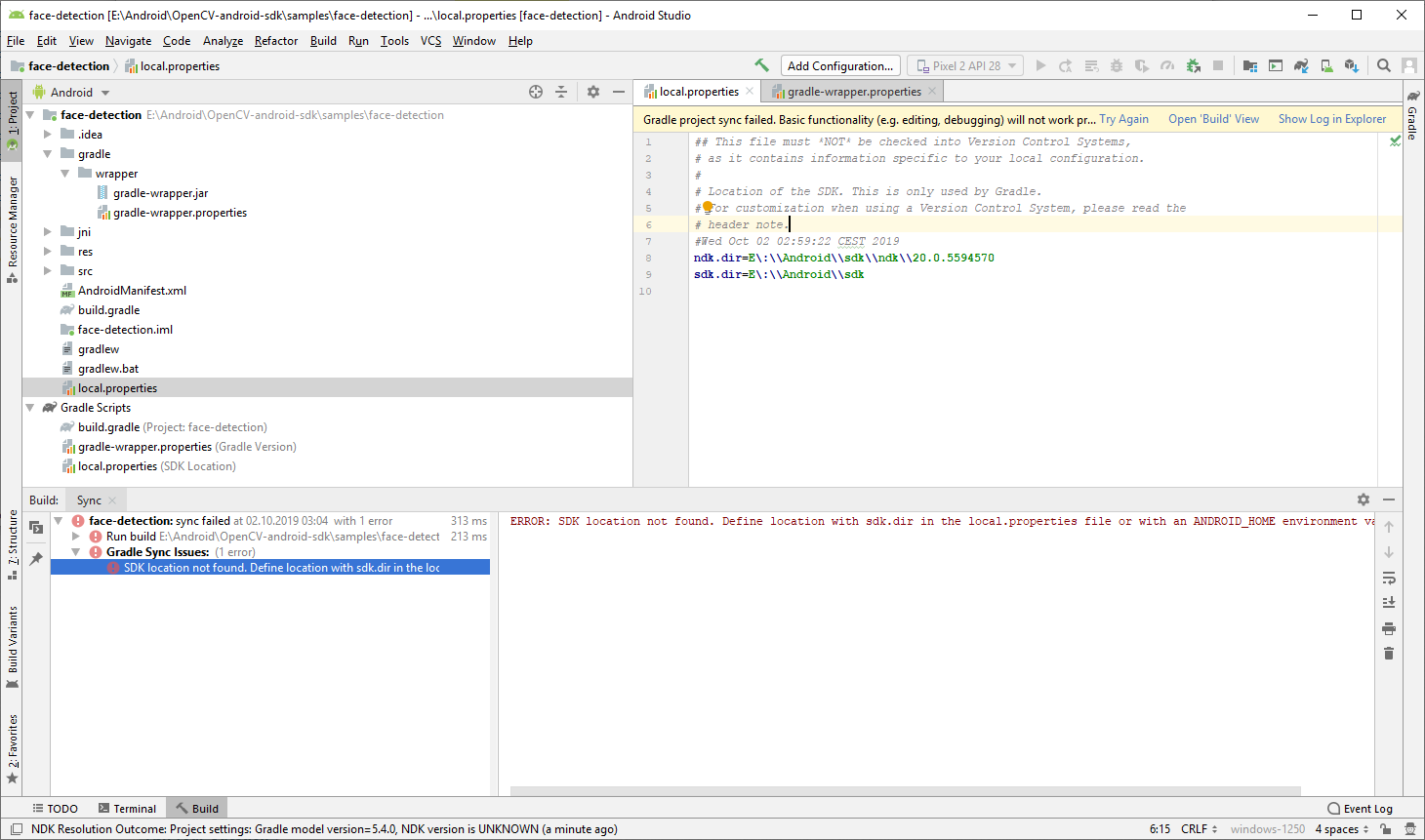
After clicking 'OK' I get the 'SDK location not found' error, even though I put it as suggested. The local.properties file seems to be ignored.
The above 'SDK not found' error will go away if I add a system variable as suggested, but then a similar one with NDK pops up. What am I doing wrong? How can I run these samples with Android Studio? I am a complete novice to Android development. Any help will be appreciated. |
| 2019-10-02 14:25:27 -0600 | commented question | How to run OpenCV Android Samples in Android Studio? Thank you so much, it works now. |
| 2019-10-01 20:13:01 -0600 | asked a question | How to run OpenCV Android Samples in Android Studio? How to run OpenCV Android Samples in Android Studio? I have been trying to run these samples for several hours, but I fa |
| 2019-09-30 19:09:08 -0600 | commented answer | Detect objects in real time video with least latency findChessboardCorders will detect the chessboard and store the square coordinates for you |
| 2019-09-24 08:31:57 -0600 | commented question | How to find the true corner points of a binary object for robot object following purposes Try Aruco markers. They will make your life easier and provide 3D position and orientation of each marker with just a fe |
| 2019-09-24 02:16:48 -0600 | answered a question | Scaning work place Calibrate your camera and undistort the image - your chessboard looks slightly rounded and so your final image is round |
| 2019-09-24 01:56:29 -0600 | edited question | Scaning work place Scaning work place Dear Developers, I am trying to scan working area in my Project, which is in form of chess board. In |
| 2019-09-23 02:42:29 -0600 | commented question | PC requirements It pretty much depends what kind of recognition and resolution you mean. If you want to have a deep network working in r |
| 2019-09-21 12:56:38 -0600 | commented question | How to detect black rectangle corners? Have you tried Harris corner detector? https://docs.opencv.org/4.1.1/d4/d7d/tutorial_harris_detector.html |
| 2019-09-21 12:52:24 -0600 | commented answer | Draw largest/rect contour on this image Yes, you can sort the contours by their size (perimeter or area, whichever you prefer) in descending order and so contou |
| 2019-09-21 12:51:40 -0600 | commented answer | Draw largest/rect contour on this image Yes, you can sort the contours by their size (perimeter or area, whichever you prefer) in descending order and so contou |
| 2019-09-20 03:30:03 -0600 | commented question | Scaning work place Please edit your question and add the input image like I added the output image. |
| 2019-09-20 03:29:21 -0600 | edited question | Scaning work place Scaning work place Dear Developers, I am trying to scan working area in my Project, which is in form of chess board. In |
| 2019-09-20 03:27:33 -0600 | commented question | Feature Detection: WarpPerspective not ok for low res images How can we help you if we can't see your code nor images? |
| 2019-09-19 11:38:55 -0600 | commented question | Is Haar cascade classifier suitable for bottle label detection? I doubt it even if you want to detect (and not recognize) them. I think there are just too many different bottles and la |
| 2019-09-18 11:53:36 -0600 | commented question | Getting the coordinates of intense non-black pixels How about thresholding that image and cutting off all pixels below, say, 250? You will have only the real red ones left. |
| 2019-09-17 18:37:37 -0600 | marked best answer | Computer Vision Annotation Tool (CVAT) for Windows? I just came across CVAT. I was thinking of writing a similar tool myself, but CVAT seems to address most of my needs, but one - I would like to use it on Windows 10. Can anyone help me here? |
| 2019-09-17 18:37:37 -0600 | received badge | ● Scholar (source) |
| 2019-09-17 18:29:45 -0600 | edited answer | Detect objects in real time video with least latency Generally you are correct. Here is a few hints: If the chessboard is stationary you do not have to detect it automatica |
| 2019-09-17 18:18:54 -0600 | answered a question | Detect objects in real time video with least latency Generally you are correct. Here is a few hints: If the chessboard is stationary you do not have to detect it automatica |
| 2019-09-17 09:01:32 -0600 | edited question | Detect objects in real time video with least latency Detect objects in real time video with least latency Dear Developers, I am require to meet requirement of one of my pro |
| 2019-09-12 15:56:13 -0600 | commented question | fixed points in findHomography White borders is a must. The asymmetric chessboard is the simplest solution. |
| 2019-09-12 15:45:43 -0600 | edited answer | finding distance between car on real-time You can get an approximate distance to an object in the image by using the pinhole camera model: from the similarity o |
| 2019-09-12 15:40:15 -0600 | edited answer | finding distance between car on real-time You can get an approximate distance to an object in the image by using the pinhole camera model: from the similarity o |
| 2019-09-12 15:38:49 -0600 | answered a question | finding distance between car on real-time You can get an approximate distance to an object in the image by using the pinhole camera model: from the similarity o |
| 2019-09-10 03:09:57 -0600 | commented question | cvtColor hls to rgb lightening image This is exactly what I meant in my comment above. |
| 2019-09-09 10:47:59 -0600 | commented question | Pattern recognition if so, go for yolo (or other deep network), with sufficient number of training samples of your logos, it should be able |
| 2019-09-09 10:26:40 -0600 | commented question | Pattern recognition using a webcam? at what resolution? where are these logos? On dirty barrels/containers in a warehouse with poor lighting |
| 2019-09-09 10:09:25 -0600 | commented question | cvtColor hls to rgb lightening image Well, the dark parts have green hue which is hardly visible in the original image. After the brightness increase it beco |
| 2019-09-09 09:40:49 -0600 | commented answer | How do i extract background from videos and remove everything from the forground. Hmm, background is everything except forground, so if you have one you have the other ... |
| 2019-09-09 09:36:44 -0600 | commented question | cvtColor hls to rgb lightening image Can you share the original image? I just tried your code with an image and it worked as expected. |
| 2019-09-09 08:00:16 -0600 | commented answer | How do i extract background from videos and remove everything from the forground. Hmm, background is everything except forground, so if you have one you have the ... |
| 2019-09-09 07:00:32 -0600 | commented question | Hardware for opencv good image quality and high resolution is the key here, I think. |
| 2019-09-09 06:56:47 -0600 | commented answer | How do i extract background from videos and remove everything from the forground. If you have problems with BGS Library try this: https://docs.opencv.org/4.1.1/d1/dc5/tutorial_background_subtraction.htm |