|
2020-05-14 02:39:34 -0600
| received badge | ● Popular Question
(source)
|
|
2018-10-28 05:27:29 -0600
| edited question | OpenCV C++ Find contour and extreme points OpenCV C++ Find contour and extreme points
Hello there,
please I want find some solution. I have these outputs with Open |
|
2018-10-28 05:26:24 -0600
| edited question | OpenCV C++ Find contour and extreme points OpenCV C++ Find contour and extreme points
Hello there,
please I want find some solution. I have these outputs with Open |
|
2018-10-27 17:33:30 -0600
| edited question | OpenCV C++ Find contour and extreme points OpenCV C++ Find contour and extreme points
Hello there,
please I want find some solution. I have these outputs with Open |
|
2018-10-27 17:32:08 -0600
| asked a question | OpenCV C++ Find contour and extreme points OpenCV C++ Find contour and extreme points
Hello there,
please I want find some solution. I have these outputs with Open |
|
2017-04-03 14:02:04 -0600
| asked a question | Android + OpenCV - Zoom camera frame Good Evening, now I have a problem with find some solution for zoom camera frames. I have a this ... 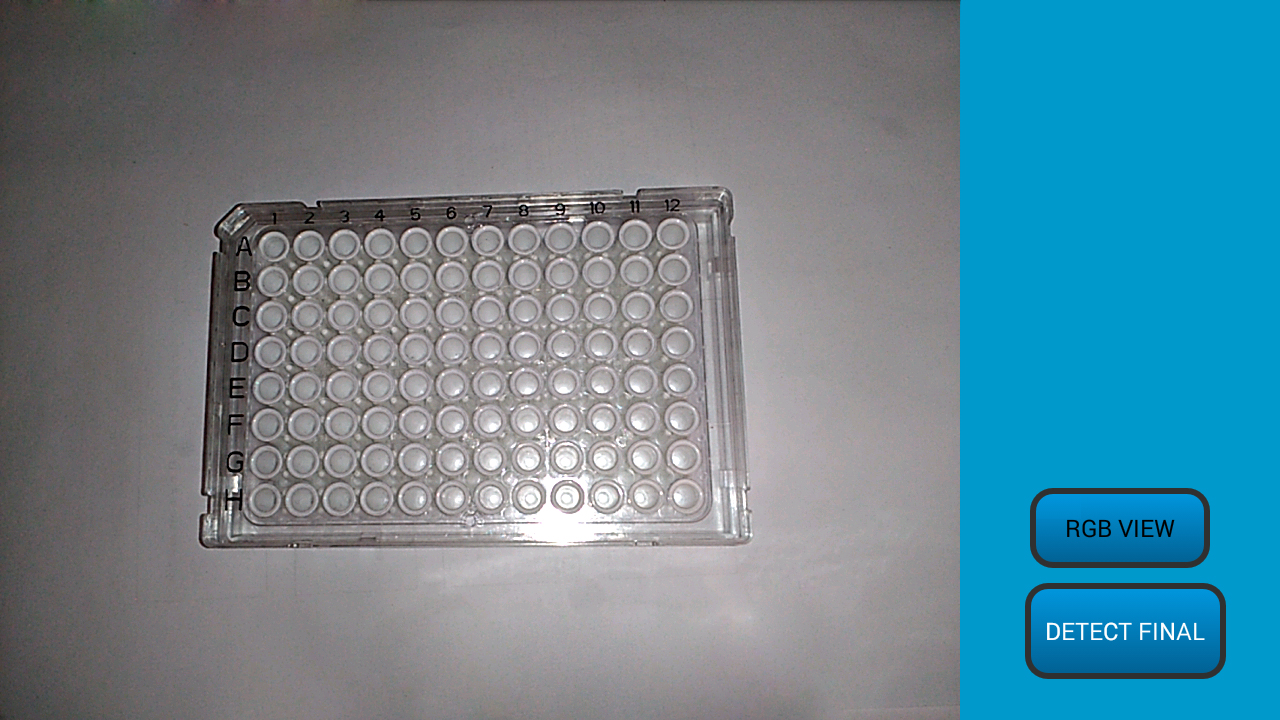
... and I want zoom it like this. 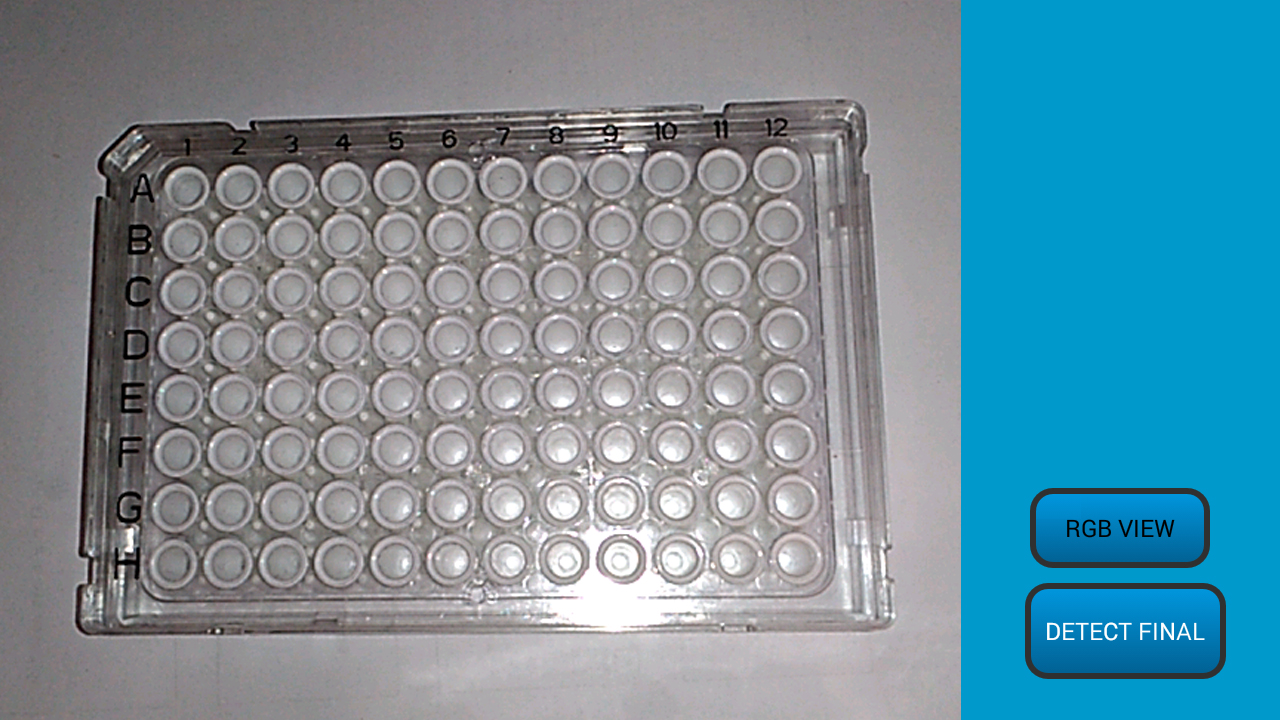
Of course I am using a onCameraFrame function, here is a code example: public Mat onCameraFrame(CameraBridgeViewBase.CvCameraViewFrame inputFrame) {
return mRgba = inputFrame.rgba();
}
Do you have any idea ? Thanks everyone for any comment and ideas ! |
|
2017-03-20 04:38:08 -0600
| commented answer | Android + OpenCV - Finding extreme points in contours That is it, but I have array with MathOfPoints data type, there is a problem. I do not know, how can I get a coordinates. |
|
2017-03-19 15:08:46 -0600
| asked a question | Android + OpenCV - Finding extreme points in contours Good Evening, I have a trouble with finding extreme points in frames. I am detecting all contours, but I want find there one extreme point, which is lowest from others (southernmost contour). Here is a preview of screen, what I have. 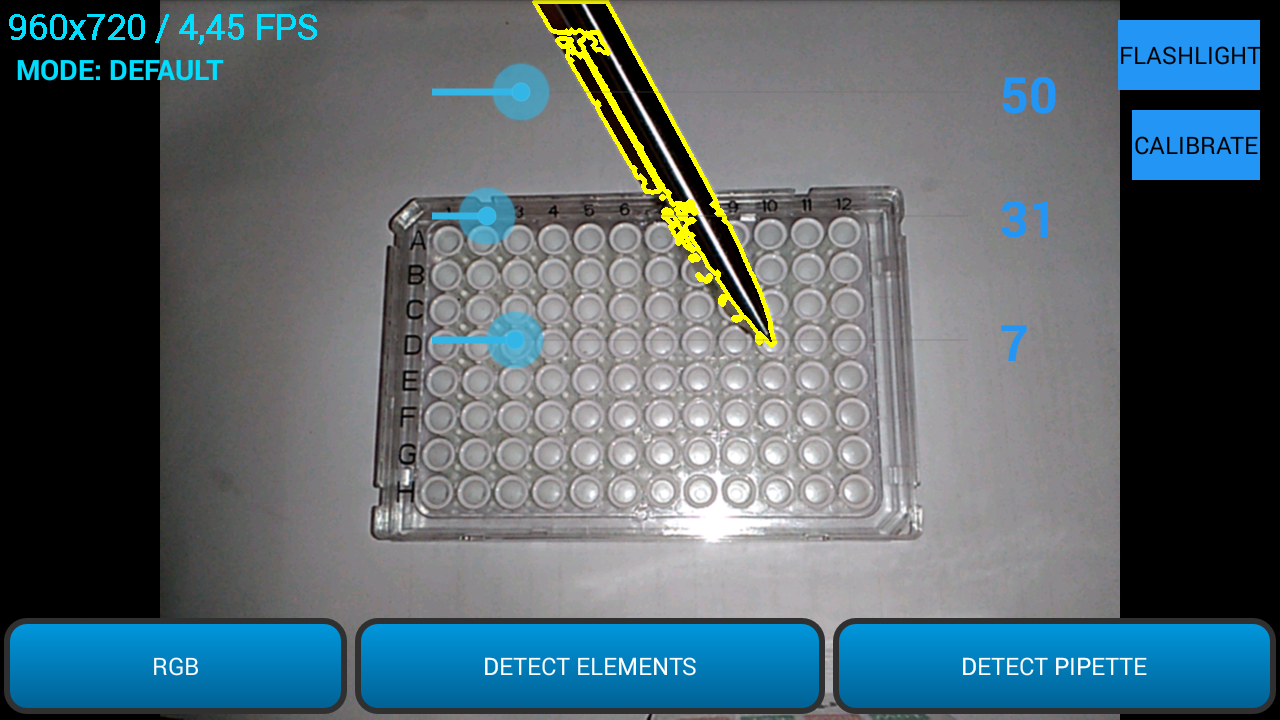
And here is a preview of screen, what I want ! For example, lowest point will bounded by red rectangle. 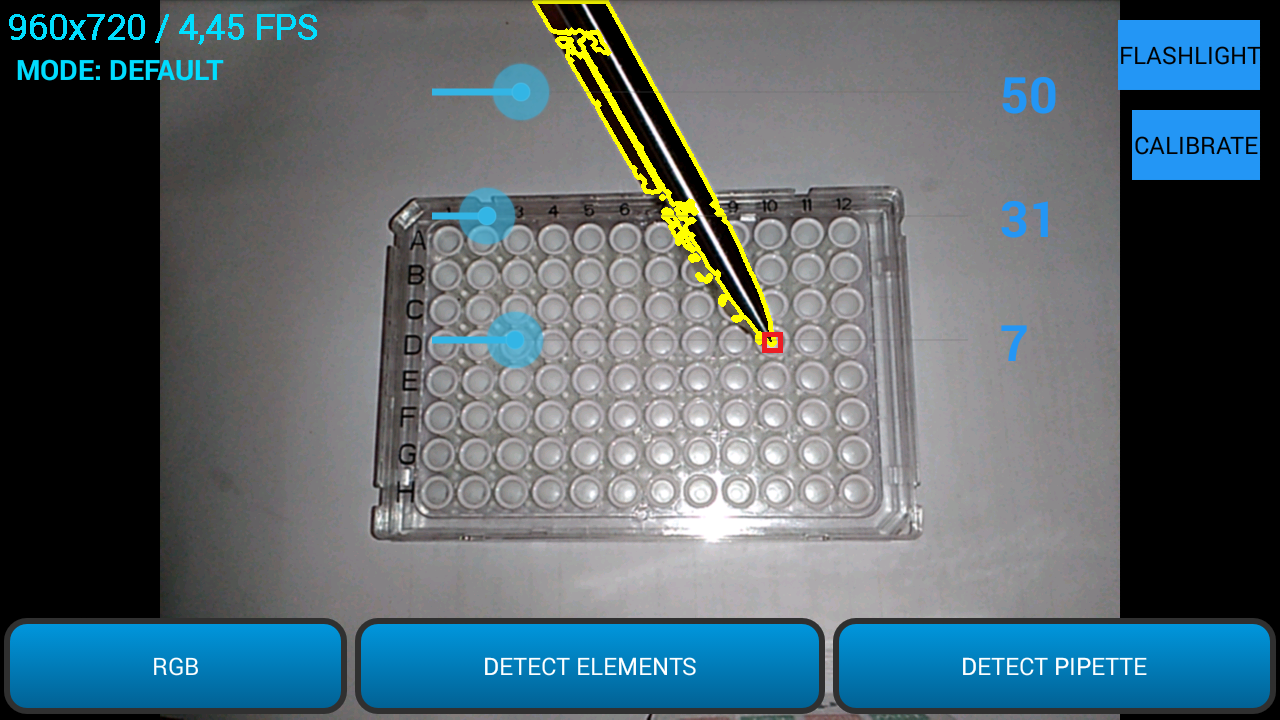 . .
And here is my code, what I have now. contours = new ArrayList<MatOfPoint>();
Rect rect;
Point c1 = new Point(); Point c2 = new Point();
Imgproc.cvtColor(mRgba, mGray, Imgproc.COLOR_RGB2GRAY);
subtractorMOG2.apply(mGray, mFGMask, 0.005);
Imgproc.threshold(mFGMask, mFGMask, 45, 255, Imgproc.THRESH_BINARY);
Imgproc.erode(mFGMask, mFGMask, new Mat());
Imgproc.dilate(mFGMask, mFGMask, new Mat());
Imgproc.findContours(mFGMask, contours, new Mat(), Imgproc.RETR_EXTERNAL , Imgproc.CHAIN_APPROX_NONE);
Imgproc.drawContours(mRgba, contours, -1, new Scalar(255, 255, 0), 3);
/*for (int idx = 0; idx < contours.size(); idx++) {
double contourarea = Imgproc.contourArea(contours.get(idx));
rect = boundingRect(contours.get(idx));
c1.x = rect.x; c1.y = rect.y;
c2.x = rect.x + rect.width; c2.y = rect.y + rect.height;
if (contourarea > 1024 && contourarea < 30000) {
Imgproc.rectangle(mRgba, c1, c2, new Scalar(255, 0, 0), 3);
}
}*/
return mRgba;
Thanks everybody for help and comments ! |
|
2017-03-10 13:19:00 -0600
| received badge | ● Enthusiast
|
|
2017-03-07 08:02:57 -0600
| asked a question | Android + OpenCV - frame processing Hello, I have a problem with developing my app. I stacked. :/ Here is a preview of screen. 
Now, where is a problem...
I would like after I click on the CALIBRATE button, last delivered frame will be save to the some matrix. In this matrix, I want a detect this small circle (see in picture) and then display this matrix with detected circles. But I want do it from one last delivered frame, when I click on CALIBRATE button. Here is my code. Thanks everyone ! :/ bCalibrate.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
isCalibration = true;
}
});
public void onCalibration(Mat inputFrame){
mCaliration = inputFrame;
Log.d("log", "mCalibration res"+mCaliration.width() + "x"+mCaliration.height());
}
@Override
public Mat onCameraFrame(CameraBridgeViewBase.CvCameraViewFrame inputFrame) {
Log.d("log", ""+inputFrame.rgba().width() + "x"+inputFrame.rgba().height());
if(isCalibration == true){
onCalibration(inputFrame.rgba());
isCalibration = false;
Log.d("log", "is WORKING");
}
int rows = (int) mRgba.height();
int cols = (int) mRgba.width();
if (isMode01Active == true) {
mRgba = inputFrame.rgba();
mGray = inputFrame.gray();
return mRgba;
}
else if (isMode02Active == true) {
return mCaliration;
}
else if (isMode03Active == true){
mRgba = inputFrame.rgba();
cvtColor(mRgba, mGray, COLOR_RGB2GRAY);
contours = new ArrayList<MatOfPoint>();
double approxDistance; // approxDistance
Rect rect;
Point c1 = new Point();
Point c2 = new Point();
curve = new MatOfPoint2f();
approxCurve = new MatOfPoint2f();
Imgproc.GaussianBlur(mGray, mGray, new Size(value03, value03), 0);
Canny(mGray, mCanny, value01, value02);
findContours(mCanny, contours, mHierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
//drawContours(mRgba, contours, -1, new Scalar(0,255,255));
int numberOfObject = 0;
for(int i = 0; i < contours.size(); ++i)
{
// Minimum size allowed for consideration
curve = new MatOfPoint2f(contours.get(i).toArray());
//Processing on mMOP2f1 which is in type MatOfPoint2f
approxDistance = Imgproc.arcLength(curve, true)*Double.MIN_VALUE;
Imgproc.approxPolyDP(curve, approxCurve, approxDistance, true);
//Convert back to MatOfPoint
points = new MatOfPoint(approxCurve.toArray());
//cArea = contourArea(contours.get(i));
rect = boundingRect(points);
c1.x = rect.x;
c1.y = rect.y;
c2.x = rect.x + rect.width;
c2.y = rect.y + rect.height;
//Mat mContourArea = contours.get(i);
double contourArea = Imgproc.contourArea(contours.get(i));
if(((rect.height < 50) && (rect.width < 50) && (rect.width > 25) && (rect.width > 25) && contourArea > 45)){
numberOfObject++;
Imgproc.rectangle(mRgba, c1, c2, new Scalar(0, 255, 255), 2);
Log.d("log", "" + contourArea);
}
}
return mRgba;
}
else {
return mRgba;
}
}
}
|
|
2017-03-07 07:18:52 -0600
| answered a question | OpenCV + Android - implement flashlight Solution is use a JavaCameraView !
In class JavaCameraView insert this functions with this body. public void turnOffTheFlash() {
Camera.Parameters params = mCamera.getParameters();
params.setFlashMode(params.FLASH_MODE_OFF);
mCamera.setParameters(params);
}
public void turnOnTheFlash() {
Camera.Parameters params = mCamera.getParameters();
params.setFlashMode(params.FLASH_MODE_TORCH);
mCamera.setParameters(params);
}
Then in your activity class create instance of JavaCameraView class, for example private JavaCameraView mOpenCvCameraView;. Finally with this instance call these functions like this. mOpenCvCameraView.turnOnTheFlash();
or mOpenCvCameraView.turnOffTheFlash();
|
|
2017-03-05 16:52:06 -0600
| received badge | ● Editor
(source)
|
|
2017-03-05 15:58:12 -0600
| commented question | OpenCV + Android - implement flashlight Thanks a lot for your time, but there is a no way how to implement it. |
|
2017-03-05 15:06:25 -0600
| commented question | OpenCV + Android - implement flashlight Hmmm, thanks for answer. So, How can I implement it, is there any simply solution ? |
|
2017-03-05 06:49:49 -0600
| asked a question | OpenCV + Android - implement flashlight Hello, I have a problem with flashlight in my app. I do not know, How can I implement it to my Android app. On frame processing I use a CameraBridgeViewBase and I use a rear mobile camera. How Can is implement simple camera flashlight ? :O Here is my code. Thanks EVERYONE ! public class MainActivity extends Activity implements CvCameraViewListener2 {
private CameraBridgeViewBase mOpenCvCameraView;
private JavaCameraView cameraView;
private Mat
mRgba,
imgGray,
imgCanny,
mResizedMat,
hierarchy;
private TextView
infoText,
text01,
text02,
text03;
private Button
button01,
button02,
button03;
private boolean
isMode01Active = false,
isMode02Active = false,
isMode03Active = false;
private SeekBar
seekBar01,
seekBar02,
seekBar03;
private int
value01 = 64,
value02 = 80,
value03 = 5;
Camera camera;
Camera.Parameters parameters;
List<MatOfPoint> contours;
private BaseLoaderCallback mLoaderCallback = new BaseLoaderCallback(this) {
@Override
public void onManagerConnected(int status) {
switch (status) {
case LoaderCallbackInterface.SUCCESS: {
camera = Camera.open(CAMERA_ID_BACK);
parameters = camera.getParameters();
parameters.setFlashMode(Camera.Parameters.FLASH_MODE_TORCH);
camera.setParameters(parameters);
mOpenCvCameraView.enableView();
mOpenCvCameraView.enableFpsMeter();
}
break;
default: {
super.onManagerConnected(status);
}
break;
}
}
};
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
// - - - > SETTING LAYOUT OF ACTIVITY
setContentView(R.layout.activity_main);
setRequestedOrientation(SCREEN_ORIENTATION_LANDSCAPE);
// < - - - END
// - - - > SET ORIENTATION OF SCREEN
getWindow().setFlags(WindowManager.LayoutParams.FLAG_FULLSCREEN,
WindowManager.LayoutParams.FLAG_FULLSCREEN);
// < - - - END
// - - - > DECLARATION OF COMPONENTS
infoText = (TextView)findViewById(R.id.infoText);
text01 = (TextView)findViewById(R.id.text01);
text02 = (TextView)findViewById(R.id.text02);
text03 = (TextView)findViewById(R.id.text03);
mOpenCvCameraView = (CameraBridgeViewBase) findViewById(R.id.camera_view);
mOpenCvCameraView.setVisibility(SurfaceView.VISIBLE);
mOpenCvCameraView.setCvCameraViewListener(this);
button01 = (Button) findViewById(R.id.button01);
button02 = (Button) findViewById(R.id.button02);
button03 = (Button) findViewById(R.id.button03);
seekBar01 = (SeekBar) findViewById(R.id.seekBar01);
seekBar02 = (SeekBar) findViewById(R.id.seekBar02);
seekBar03 = (SeekBar) findViewById(R.id.seekBar03);
// < - - - END
isMode01Active = true;
infoText.setText("MODE1: ACTIVE");
button01.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
mOpenCvCameraView.enableFpsMeter();
infoText.setText("MODE1: ACTIVE");
setModelStatus("mode1");
}
});
button02.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
mOpenCvCameraView.enableFpsMeter();
infoText.setText("MODE2: ACTIVE");
setModelStatus("mode2");
}
});
button03.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
mOpenCvCameraView.enableFpsMeter();
infoText.setText("MODE3: ACTIVE");
setModelStatus("mode3");
}
});
seekBar01.setMax(150);
seekBar02.setMax(150);
seekBar03.setMax(45);
seekBar01.setProgress(value01);
seekBar02.setProgress(value02);
seekBar03.setProgress(value03);
text01.setText(""+value01);
text02.setText(""+value02);
text03.setText(""+value03);
seekBar01.setOnSeekBarChangeListener(new SeekBar.OnSeekBarChangeListener() {
@Override
public void onProgressChanged(SeekBar seekBar, int i, boolean b) {
value01 = i;
text01.setText(""+value01);
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
}
});
seekBar02.setOnSeekBarChangeListener(new SeekBar.OnSeekBarChangeListener() {
@Override
public void onProgressChanged(SeekBar seekBar, int i, boolean b) {
value02 = i;
text02.setText(""+value02);
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
}
});
seekBar03.setOnSeekBarChangeListener(new SeekBar.OnSeekBarChangeListener() {
@Override
public void onProgressChanged(SeekBar seekBar, int i, boolean b) {
if(i % 2 != 0)
value03 = i;
text03.setText(""+value03);
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
}
});
}
@Override
public void onPause() {
super.onPause();
if (mOpenCvCameraView != null)
mOpenCvCameraView.disableView();
}
@Override
public void onResume() {
super.onResume();
if (!OpenCVLoader.initDebug()) {
OpenCVLoader.initAsync(OpenCVLoader.OPENCV_VERSION_3_1_0, this, mLoaderCallback);
} else {
mLoaderCallback.onManagerConnected(LoaderCallbackInterface.SUCCESS);
}
}
@Override
public void onDestroy() {
super.onDestroy();
if (mOpenCvCameraView != null)
mOpenCvCameraView.disableView();
}
@Override
public void onCameraViewStarted(int ...
(more) |