This forum is disabled, please visit https://forum.opencv.org
| 2020-04-01 07:33:43 -0600 | asked a question | Merging low-angleillumination frames to edge-image Merging low-angleillumination frames to edge-image Hi, I would like to Merge low-angle illumination frames to an edge-i |
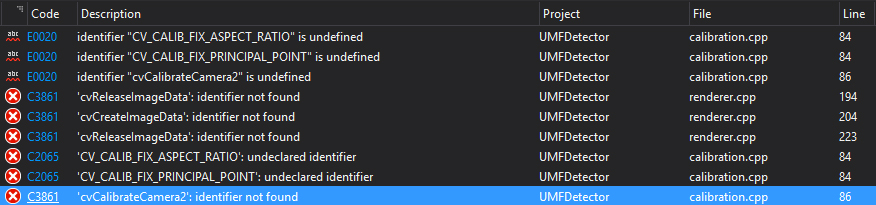
| 2017-07-16 03:51:05 -0600 | asked a question | cvRelaseImageData in OpnCV 3.x? Hi, I try to build a project in Visual Studio use OpenCV. I think it's made with VisualStudio 2013 and OpenCV 2.4.9 or earlier version. Unfortunately, the Visual Studio 2013 is no longer available, but the OpenCV 2.4.9 don't support Visual Studio 2015. So, I got this error below, anyone has an idea how can I fix it? (now I use VS2017 and OpenCV 3.2.0) this was the project; https://github.com/uniform-marker-fie...
Thank you very much! |
| 2017-06-22 12:10:01 -0600 | commented question | fisheye.cpp:424: error: (-215) (K.depth() ...can anyone know the solution? Yes, this is the problem, but I don't know what is this files;Here load the files, but I just find one in the directory; Thanks you! |
| 2017-06-22 11:32:36 -0600 | asked a question | fisheye.cpp:424: error: (-215) (K.depth() ...can anyone know the solution? Hi, I tried a OpenCV Aruco board project in Python; https://github.com/LongerVision/OpenC... And I got the error below; "map1, map2 = cv2.fisheye.initUndistortRectifyMap(camera_matrix, dist_coeffs, r, new_camera_matrix, image_size, cv2.CV_16SC2) cv2.error: C:\projects\opencv-python\opencv\modules\calib3d\src\fisheye.cpp:424: error: (-215) (K.depth() == CV_32F || K.depth() == CV_64F) && (D.depth() == CV_32F || D.depth() == CV_64F) in function cv::fisheye::initUndistortRectifyMap" And this was the problematic line; map1, map2 = cv2.fisheye.initUndistortRectifyMap(camera_matrix, dist_coeffs, r, new_camera_matrix, image_size, cv2.CV_16SC2) Anyone know solutions to fix it? Thank you very much! |
| 2017-02-16 05:16:11 -0600 | commented question | recognize 3D models (.stl) from camera image First, I think in a single RGB (maybe webcam) without any structured light... but; now I bought a ToF (Time-of-Flight Camera) is it good for this? |
| 2017-02-16 03:54:48 -0600 | commented question | recognize 3D models (.stl) from camera image Thanks! It can be used with a simple webcam, or just work with deepth camera only? (like kinect) |
| 2017-02-15 10:11:22 -0600 | asked a question | recognize 3D models (.stl) from camera image Hi, I'm seeking a solution in OpenCV to match a 3D scanned model (e.g an .STL file) with a real object from camera imput, to recognize it. Anyone had an idea, what is the best way to start? Thank you very much! |
| 2017-02-13 02:42:27 -0600 | received badge | ● Enthusiast |
| 2017-02-12 05:58:02 -0600 | commented question | cv to cv2... is there a simple solution? Thanks a lot! @berak; I installed OpenCV 2.4.12, but I can't use "import cv", just "cv2" with this this error; import cv ImportError: DLL load failed, so the problem is the same :/ @sturkmen; thanks for the solution, I try to use it to build my own solution, but unfortunately it did not work with webcam as the previous (what I linked) |
| 2017-02-11 12:05:41 -0600 | commented question | cv to cv2... is there a simple solution? Thanks for the quick answer! I just want to recognize a rubik's cube with a camera and save the colors of the sides to a matrix |
| 2017-02-11 11:28:39 -0600 | asked a question | cv to cv2... is there a simple solution? Hi, I find this great script, https://sourceforge.net/projects/pyru... but it's use the old "import cv" instead of cv2. Is there any simple solution, to upgrade to cv2? especially the "cubefinder" folder is important for me! Thank you very much! |
| 2017-01-27 12:10:05 -0600 | commented question | BoundingBox from minEnclosingCircle Hi, sorry I find the solution! Thanks! |
| 2017-01-27 11:30:49 -0600 | commented question | BoundingBox from minEnclosingCircle Hi, thanks for the quick answer! I just learn how to visualize different solutions to bounding the masked objects, but I stuck here because if we change the circle to rectangle, get the following error: "SystemError: new style getargs format but argument is not a tuple" |
| 2017-01-27 10:37:42 -0600 | received badge | ● Editor (source) |
| 2017-01-27 10:33:08 -0600 | commented question | Whole RED area in HSV colorspace Thank you very much, works great! |
| 2017-01-27 10:33:06 -0600 | asked a question | BoundingBox from minEnclosingCircle Hi, I would like to change the minEnclosingCircle to a BoundingBox from this example in Python; http://www.pyimagesearch.com/2015/09/... Can someone help me in this? Thank you very much! |
| 2017-01-24 14:32:47 -0600 | asked a question | Whole RED area in HSV colorspace Hi, Maybe, I have a very stupid question, but how can I cover the whole area of the read area, when I used this color for object tracking? Because, redLower = (0, 65, 100) redUpper = (20, 250, 250) in this solution I have the area from H; 0-20, or 170-179, but how to cover this area together in Python? Example, from H; 170 to 20? Thank you very much! |