This forum is disabled, please visit https://forum.opencv.org
| 2023-07-27 10:25:11 -0600 | received badge | ● Popular Question (source) |
| 2023-07-27 10:25:11 -0600 | received badge | ● Notable Question (source) |
| 2021-04-14 17:56:58 -0600 | received badge | ● Popular Question (source) |
| 2020-11-08 20:41:09 -0600 | received badge | ● Popular Question (source) |
| 2020-10-20 00:09:05 -0600 | marked best answer | pointPolygonTest() throws error for some reason I am using the following piece of code to check if a point is inside the contour or not: and I get the following error for some reason: This error message does not tell much to be honest, and I have absolutely no idea why this is happening. I checked the image, it's there. The contour and the point are also there, nothing is null or whatsoever. P.S: In case if it helps, I tried to print the variable Any idea? |
| 2020-06-07 16:14:40 -0600 | received badge | ● Famous Question (source) |
| 2020-03-08 17:45:22 -0600 | received badge | ● Popular Question (source) |
| 2020-03-08 17:45:22 -0600 | received badge | ● Notable Question (source) |
| 2019-09-18 02:03:09 -0600 | edited question | Getting the coordinates of intense non-black pixels Getting the coordinates of intense non-black pixels I have the below image as an output of my prediction function (of a |
| 2019-09-18 02:02:22 -0600 | asked a question | Getting the coordinates of intense non-black pixels Getting the coordinates of intense non-black pixels I have the below image as an output of my prediction function (of a |
| 2019-07-26 09:14:18 -0600 | edited question | What's the frame OpenCV uses? What's the frame OpenCV uses? I have two cameras, monocular and stereo. I calibrated both and they're mounted at a fix r |
| 2019-07-26 09:11:23 -0600 | edited question | What's the frame OpenCV uses? What's the frame OPENCV uses? I have two cameras, monocular and stereo. I calibrated both and they're mounted at a fix r |
| 2019-07-26 09:10:35 -0600 | asked a question | What's the frame OpenCV uses? What's the frame OPENCV uses? I have two cameras, monocular and stereo. I calibrated both and they're mounted at a fix r |
| 2019-07-15 21:50:09 -0600 | received badge | ● Self-Learner (source) |
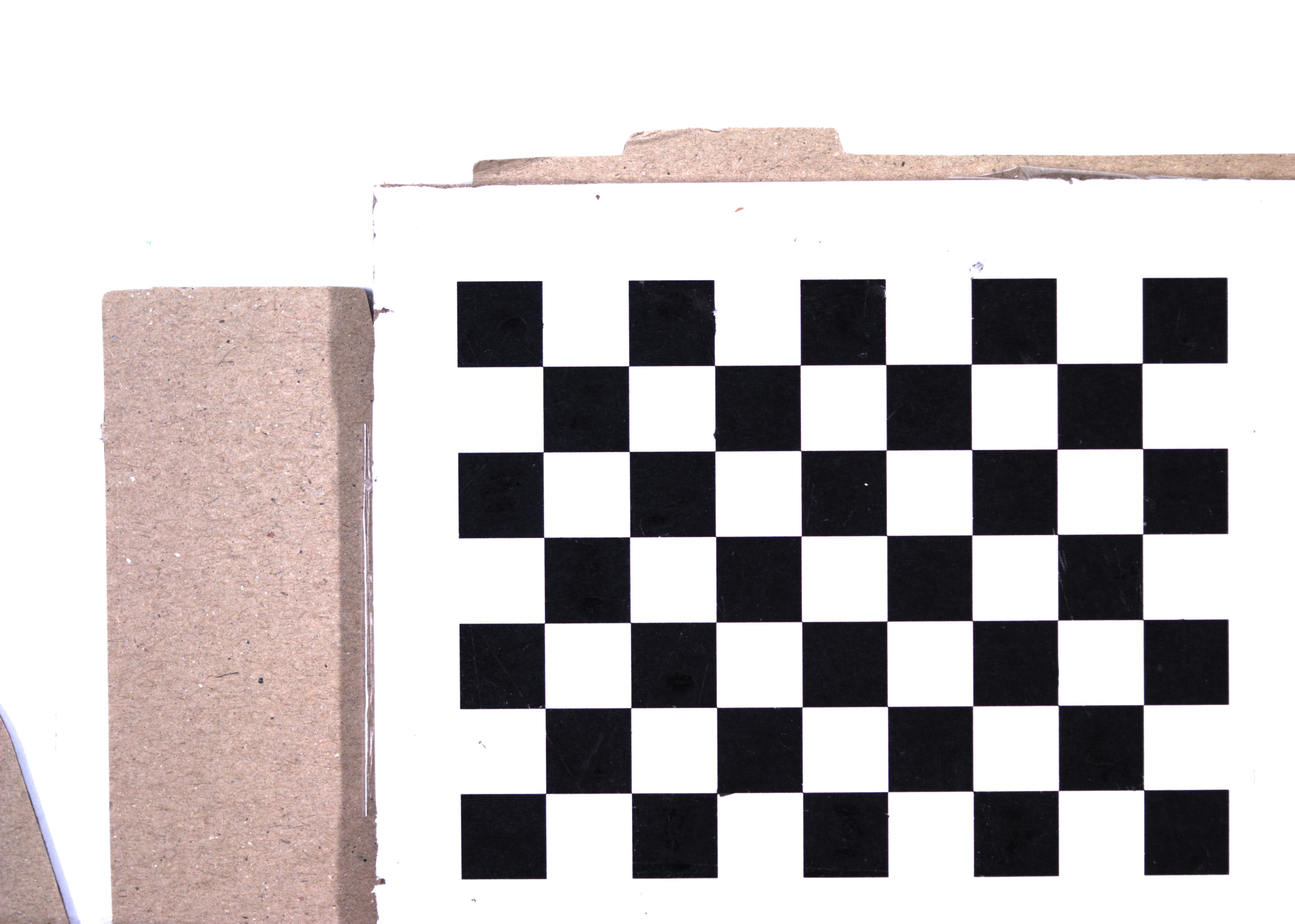
| 2019-07-15 07:43:24 -0600 | marked best answer | findChessboardCorners() does not work[SOLVED] I've my checkerboard fixed at a flat surface and I am looking at it with a 4K monocular camera, yet, the code provided does not work. My goal is to find the board's pose w.r.t the camera. it can't continue from the last line, which means it cannot find the squares/corners. Here is my checkerboard I thought it was not finding it due to the scratches and dirt, so I tried with a better image and it still did not work. Is this function kinda buggy or somehow sensitive that it takes such a big effort to make it work? EDIT: Changing the lightning conditions did not help either:
|
| 2019-07-15 07:42:42 -0600 | answered a question | findChessboardCorners() does not work[SOLVED] Okay, got it, the problem was while passing the image.png, I did not use the appropriate path, so the function never eve |
| 2019-07-15 07:28:00 -0600 | edited question | findChessboardCorners() does not work[SOLVED] findChessboardCorners() does not work I've my checkerboard fixed at a flat surface and I am looking at it with a 4K mono |
| 2019-07-15 07:23:18 -0600 | asked a question | findChessboardCorners() does not work[SOLVED] findChessboardCorners() does not work I've my checkerboard fixed at a flat surface and I am looking at it with a 4K mono |
| 2019-07-15 06:53:48 -0600 | commented answer | How to generate checkerboard for camera calibration? Would circle one work for monocular camera calibration, or is it used for stereo? |
| 2019-07-02 04:49:08 -0600 | edited question | Camera Pose from Checkerboard Pose Camera Pose from Checkerboard Pose I am using the code given by the OpenCV to find tvecs and rvecs of the camera which I |
| 2019-03-13 04:06:15 -0600 | commented question | OpenCV Error: Null pointer (NULL guiReceiver (please create a window)) Facing the same. Unbelievable that no one has replied yet. |
| 2019-03-13 04:05:26 -0600 | commented question | Camera Pose from Checkerboard Pose Yes I used that code, as I wrote in the question body. |
| 2019-03-06 10:55:37 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |
| 2019-03-06 10:54:17 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |
| 2019-03-06 10:43:41 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |
| 2019-03-06 10:35:30 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |
| 2019-03-06 09:01:35 -0600 | commented question | Camera Pose from Checkerboard Pose These matrices can be passed in to the function like this : retval, rvecs, tvecs, inliers = cv2.solvePnPRansac(objp, cor |
| 2019-03-06 09:00:28 -0600 | commented question | Camera Pose from Checkerboard Pose As an example, here are mine: M_MATRIX = np.asmatrix([21696.117836, 0.000000, 1956.264838, 0.000000, 22075.059632, 531. |
| 2019-03-06 08:59:23 -0600 | commented question | Camera Pose from Checkerboard Pose @supra56 That is the output of your intrinsic calibration procedure, but you can also simply create two arrays containin |
| 2019-03-06 03:14:12 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |
| 2019-03-06 03:12:42 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |
| 2019-03-06 03:12:39 -0600 | received badge | ● Self-Learner (source) |
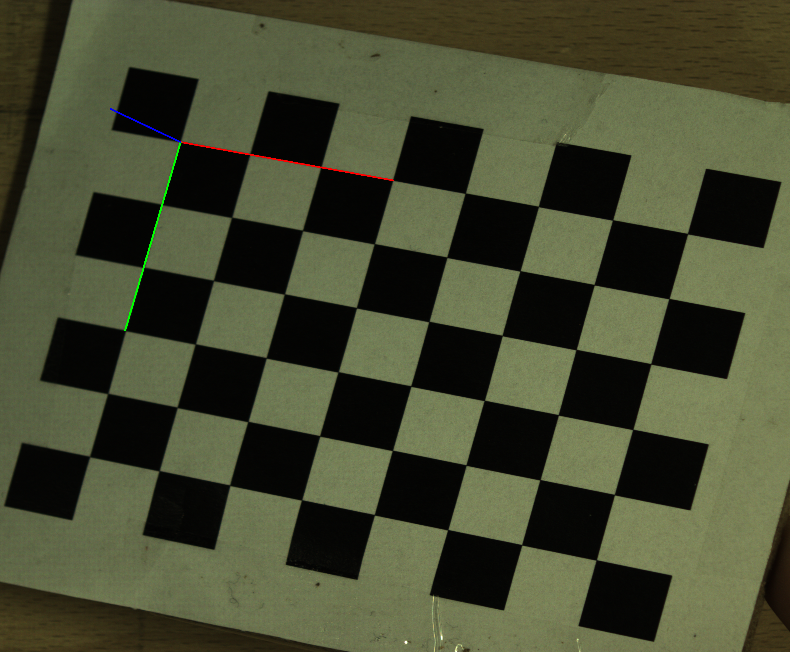
| 2019-03-06 03:12:20 -0600 | marked best answer | Camera Pose from Checkerboard Pose I am using the code given by the OpenCV to find tvecs and rvecs of the camera which I calibrated intrinsically. I do get these two vectors, no problem.
However, I am not sure if these are the values for my camera or my checkerboard. The language used in the tutorial isn't totally clear. But I think these are the values for the checkerboard, like, this isn't the pose of the camera, but rather the pose of the board, which is not why people use this code in the first place. Also, if these are actually the camera parameters, then one must multiply 77 with the size of one checker that he uses. Mine has 11 mm side, so for me the height would correspond to Something is fishy here. My question is, how could we go to camera extrinsics from these vectors? |
| 2019-03-06 03:12:01 -0600 | edited answer | Camera Pose from Checkerboard Pose So, this is how it is done. First, you calibrate your camera intrinsically. Get the matrices required for the calculati |