This forum is disabled, please visit https://forum.opencv.org
| 2020-10-29 17:17:23 -0600 | received badge | ● Famous Question (source) |
| 2019-12-16 06:19:52 -0600 | received badge | ● Popular Question (source) |
| 2018-07-11 19:44:50 -0600 | received badge | ● Notable Question (source) |
| 2017-05-07 01:29:07 -0600 | received badge | ● Popular Question (source) |
| 2014-06-08 22:33:28 -0600 | commented question | count object in kalman filter how, could u pls explain what need to change &/or modification... |
| 2014-06-07 02:59:41 -0600 | asked a question | count object in kalman filter In kalman filter, how to count detected object in sequence and is there any easiest way to ignore nearest object. MOG will provide good BG subtraction but it will work only for object near to cam. |
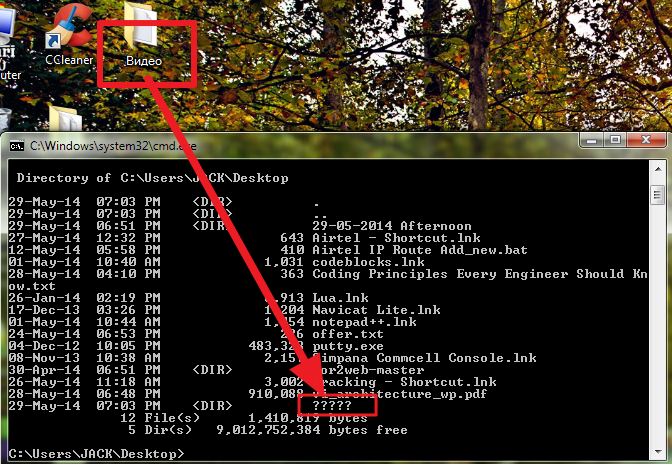
| 2014-05-29 08:41:09 -0600 | answered a question | Problem with russian letters Actually Window can not recognize the name of folder in russian language,(if your window default language is in English) for test i create a folder with name "Видео" and in command it show "????"(check screenshot)
|
| 2014-05-27 06:24:50 -0600 | answered a question | Which IP camera more suitable for my project use the following software to check the focal length, distance, etc parameter for IP based camera. Software name: IP Design Tool Setup |
| 2014-04-26 23:50:08 -0600 | answered a question | Help! Installation of OpenCV Use Codeblock IDE for coding (Alternative of Visual Studio) and for opencv library intergration use Following Link. This is the Simplest way to use Opencv features & explore it.... |
| 2014-04-26 23:31:16 -0600 | commented question | Cascade classifier, few questions To train perfect, STAGES should be as high as possible. if you trained the object with 30 to 40 stages this will provide the perfect detection. |
| 2014-04-26 23:20:40 -0600 | commented question | algorithm to detect only slow moving object use Tracking (like Kalman, KLT) and/or find the centroid & track only moving/change pixel value on centroid. |
| 2014-04-25 02:02:54 -0600 | answered a question | Deer Detection Use Haar cascade classifier training and generate xml file, this will find the deer very easily, here is the demo on face detection using haar cascade Link |
| 2014-04-24 08:21:50 -0600 | commented question | Direction of Vehicle @steven i successfully implemented the KLTTracking, & able to track each vehicle. There are some minor issue but i handle them, Thanks for reply and good luck.. |
| 2014-04-22 23:21:56 -0600 | commented question | Direction of Vehicle Yes, i done that, but inbetween with multiple vehicle (in same direction) the centroid will overlab.. Y:125 Y:129 Y:135 Y:75 Y:59 Y:62 |
| 2014-04-22 09:19:12 -0600 | commented question | Direction of Vehicle Vow! how u do that(Nice Animation), but i already using optical flow with Lucas-Kanade method, in this i stuck on multiple vehicle. Can we find the direction using centriod (on multiple vehicle).... |
| 2014-04-22 04:47:24 -0600 | received badge | ● Student (source) |
| 2014-04-22 01:53:51 -0600 | asked a question | Direction of Vehicle How to Identify the direction of vehicle in up or down direction, (1) i am able to detect vehicle with its centriod.
|
| 2014-04-03 02:30:26 -0600 | received badge | ● Self-Learner (source) |
| 2014-04-02 23:45:28 -0600 | answered a question | how to Ignore bounding box inside bounding box Well, thanks haris for a new concept(really useful), but i use Steven code ie above sample code will solve my issue. But @Haris and @steven thanks for immediate reply & good luck |
| 2014-03-31 23:48:30 -0600 | commented question | how to Ignore bounding box inside bounding box Ah confused, can you provide some link or code(rough code). |
| 2014-03-31 07:23:55 -0600 | asked a question | how to Ignore bounding box inside bounding box when i draw the bounding box with centriod, i got the bounding box inside bounding box like this
Actually i want to ignore the inner bounding box in all my bounding box. I am using below code with ignoring all circles. link |
| 2014-03-02 22:42:39 -0600 | answered a question | Image Crop croping should be done by this method in C++, i got accurate croping image. |
| 2014-03-02 22:23:30 -0600 | received badge | ● Editor (source) |
| 2014-03-02 22:21:57 -0600 | answered a question | OpenCV ip camera hi use port also like this..
use your IP address in place of 192.168.1.110 |
| 2014-03-02 22:14:52 -0600 | answered a question | need help for object tracking Use haartraining cascade classifier for hand detection, and for counting try number of frames per seconds. |
| 2014-02-26 22:46:51 -0600 | commented answer | how to save current frame and previous frame thanks hristov, its working.... good day....... |
| 2014-02-26 22:45:58 -0600 | received badge | ● Scholar (source) |
| 2014-02-26 00:09:59 -0600 | asked a question | how to save current frame and previous frame i want to save the current frame and previous frame in some directory from video in opencv. i am using C++ and opencv 2.4.8 library. |
| 2014-01-29 23:37:08 -0600 | commented answer | haartraining counting Thanks, first i will transform my code then I will look into this and get back to you |
| 2014-01-29 07:18:31 -0600 | asked a question | haartraining counting i used haartraininng to count the object, but this will count frame by frame. So can we use this to count a object one time only. |
| 2013-10-21 01:00:32 -0600 | commented question | cvblob error in Window IDEs Well cvblob ( http://code.google.com/p/cvblob/ ) which is the opencv opensource library, which will detect any object as shown in red object detection is used by some experts, but while running this above error shown..but while compiling or building it didn't show any error.... |
| 2013-10-18 01:49:51 -0600 | asked a question | cvblob error in Window IDEs When i m compiling cvblob "red object detection example" i a getting following error in Visual studio 2012, CODE BLOCK IDE, NETBEAM IDE. ...test1/source.cpp:50: undefined reference to `cvLabel', ...test1/source.cpp:52: undefined reference to `cvRenderBlobs', ...test1/source.cpp:54: undefined reference to `cvFilterByArea' After compiling i m not getting any error, but After running the program i m facing above error i m using opencv 2.4.6 also tryed with opencv 2.4.2 Eveery opencv code is running in above IDE but blob give an error WHY...????????? |