This forum is disabled, please visit https://forum.opencv.org
| 2016-10-05 04:28:02 -0600 | commented question | Calculate length between 2 points in c++ any suggestions about the logic or if there is some error in that implementation. because I have considered as if(pixel val > 0) condition. |
| 2016-10-05 04:09:11 -0600 | commented question | Calculate length between 2 points in c++ this does not give me binary image because looking at max and min values it still gives min as 0 and max as 255. |
| 2016-10-05 03:53:11 -0600 | commented question | Calculate length between 2 points in c++ I am not able to get it in binary form using that code so I removed it. I am getting this image from octave which is in terms of 1 and 0 but dint find any way to directly store an image in binary format. I know its histogram from 0-255 and when trying to threshold based on value(50). I end up losing important points. any suggestions on how I can do it? |
| 2016-10-05 03:35:16 -0600 | commented question | Calculate length between 2 points in c++ this is real code I was trying something so I took initial image in img2 and then was after checking if its binary I was passing it to check length function. I removed binary check step so this typo. |
| 2016-10-05 03:32:44 -0600 | received badge | ● Editor (source) |
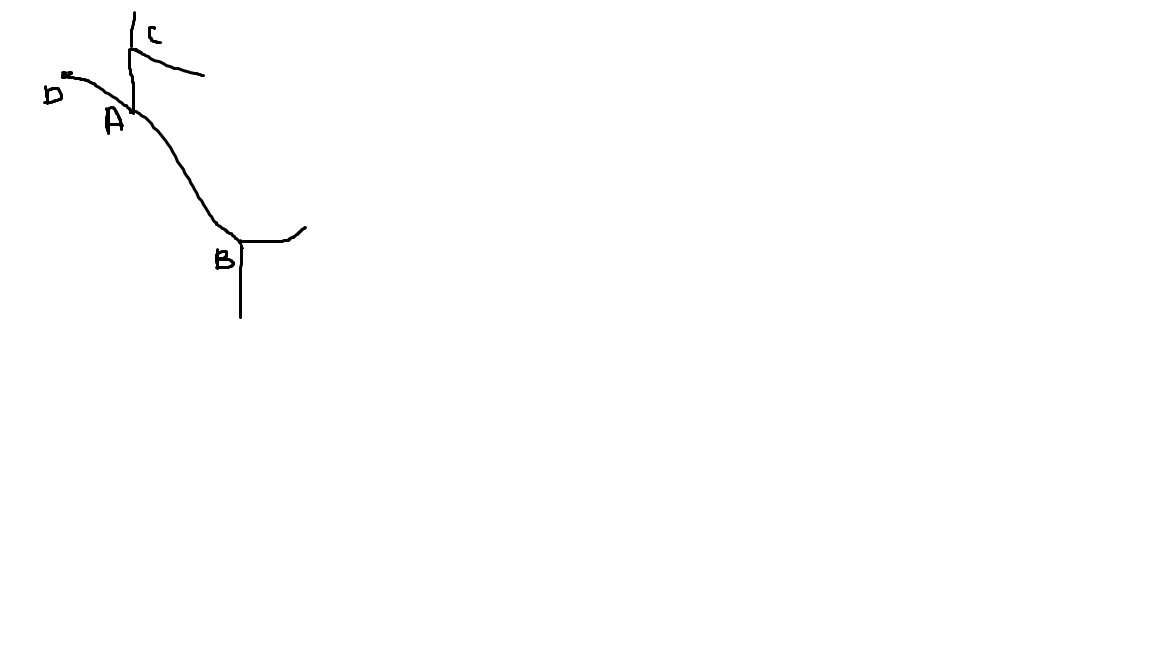
| 2016-10-05 03:24:14 -0600 | asked a question | Calculate length between 2 points in c++ I need to calculate length of lines(number of pixels along the path) from a point until a terminal point. terminal point is a point which either ends or which has more than one line starting from that point. For example, in below image I need to calculate length between A->B, A->C, A->D. I have attempted but then it goes into forever loop and I am not understanding why. I am new to work with images. so to do that I want to implement a logic in which I select neighbouring 8 pixels of a point and if its 1 then it should do a depth first till terminal and store that point in a hashmap. Please give me any suggestions. I am stuck on this. I can also share the original image if thats required. below image is only to explain problem
|